收稿日期:2016-03-09;修回日期:2016-09-18
作者简介:周建(1987—),男,博士,研究领域为虚拟振动技术及气动弹性力学
作者简介:周建(1987—),男,博士,研究领域为虚拟振动技术及气动弹性力学
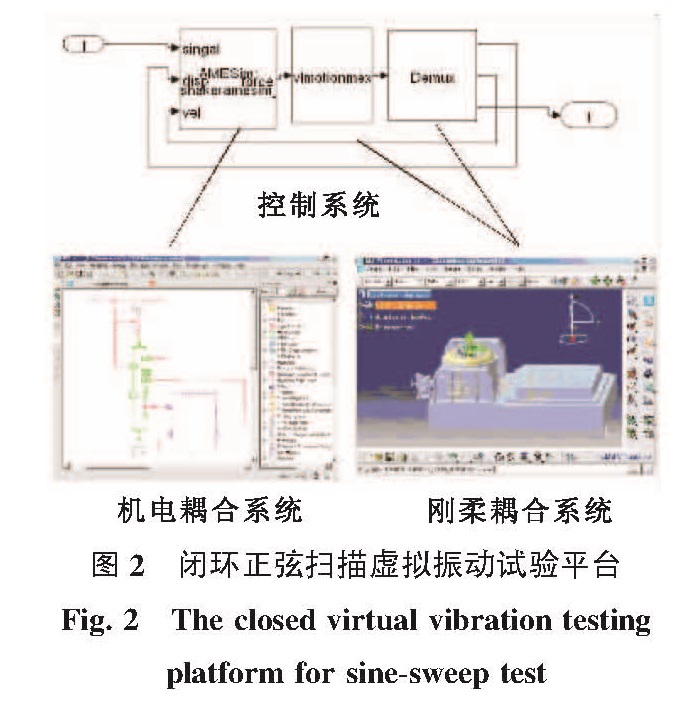
对电动振动台机电耦合系统进行辨识,通过Amesim软件建立了电动振动台的机电耦合模型,在Virtual.lab软件中建立了振动台与试验件的刚柔耦合模型,借助Matlab/Simulink软件建立了振动台的控制系统,最终基于联合仿真技术建立起了闭环虚拟振动台的正弦扫描振动试验平台。通过算例研究,表明所建立的虚拟振动试验平台能够很好地实现对试验件的正弦扫描振动试验,并能够实现仿真结果在Virtual.lab中的可视化。
In this paper, the electromechanical coupling system was identified and then was built in the Amesim environment. The rigid-flexible coupled model of shaker and test specimen was built in the Virtual.lab environment. The control system was modeled by means of Matlab/Simulink. The closed virtual vibration testing platform for sine-sweep test was constructed by using co-simulation technology. The results obtained by simulation example demonstrate the sine-sweep test can be simulated well by using the proposed virtual vibration testing platform and the time dependent stress contour of test part can be displayed in the Virtual.lab.


 为弹性支撑圆频率;
为弹性支撑圆频率; 为电谐振圆频率;
为电谐振圆频率; 为动圈轴向谐振圆频率;ξ1为台面弹性支撑阻尼比;
为动圈轴向谐振圆频率;ξ1为台面弹性支撑阻尼比; 为电阻尼比;ξ3为线圈与台面之间的阻尼比。
为电阻尼比;ξ3为线圈与台面之间的阻尼比。



 ;T(ωi)为系统的反传递函数;c为压缩因子。
;T(ωi)为系统的反传递函数;c为压缩因子。