收稿日期:2017-07-14
基金项目:国家基础研究项目(613321)
作者简介: 王振(1984—),男,博士后,研究领域为液体火箭发动机结构安全评价技术
基金项目:国家基础研究项目(613321)
作者简介: 王振(1984—),男,博士后,研究领域为液体火箭发动机结构安全评价技术
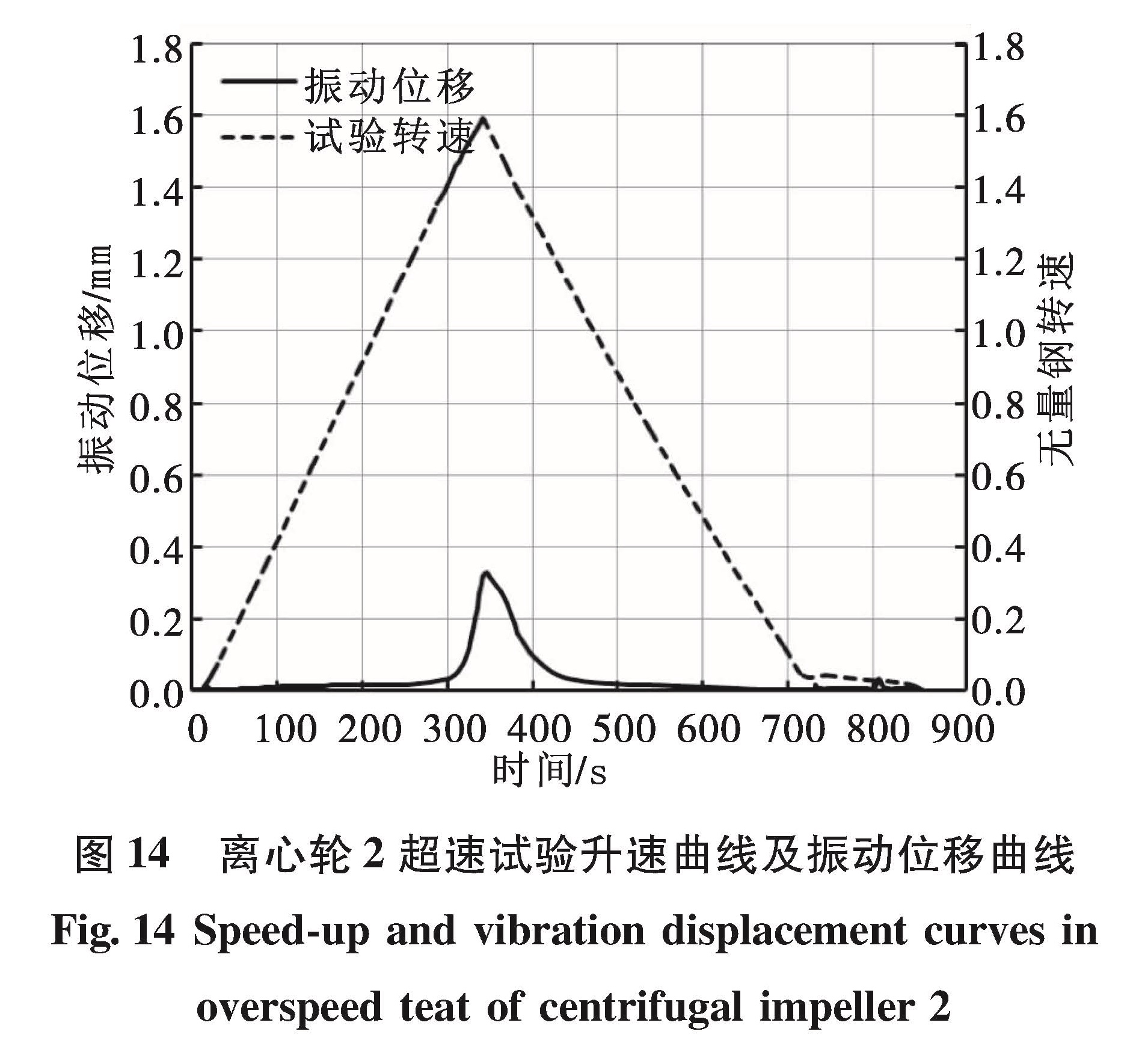
为确保液体火箭发动机离心泵叶轮(离心轮)安全可靠工作,提出了基于强度的最大“正”等效应力法和基于刚度的双切线法两种失效判别准则以进行离心轮极限转速分析,并开展了离心轮超速试验进行验证。结果 表明:最大“正”等效应力法准确地预测了离心轮破裂起始位置和破坏形式,误差低于15%; 双切线法预测的屈服转速与试验结果符合较好,误差低于5%。对于塑性较好的离心轮结构,采用屈服转速替代破裂转速进行极限转速设计分析更利于实现低成本、高可靠性的设计目标。
In order to guarantee the safety and reliability of centrifugal impeller in the liquid rocket engine(LRE),two failure criterions,that is the maximum positive equivalence stress method for strength and the double tangent intersection method for stiffness,are proposed to compute the limit rotation speed of centrifugal pump impeller in LRE.The corresponding overspeed spin tests were conducted to verify and compare the above two failure criterions.The results show that the maximum positive equivalence method can correctly predict the initial position and form of the failure,whose relative error is less than 15%,and the double tangent intersection method has predicted the closest results compared to that of the spin testing,whose relative error is less than 5%.For the centrifugal impellers with high plasticity,the yield speed is selected instead of the burst speed for the limit speed design and analysis,which is more helpful for realization of the low cost and high reliability of design goals.