2.1 流场探测装置安装位置仿真研究
当发动机推力需求增大使燃烧室供油流量增大、室压提高时,进气道结尾激波位置前移越过流场探测装置时,探测装置能够及时准确地捕捉到流场状态的变化,并开始使发动机按预定的供
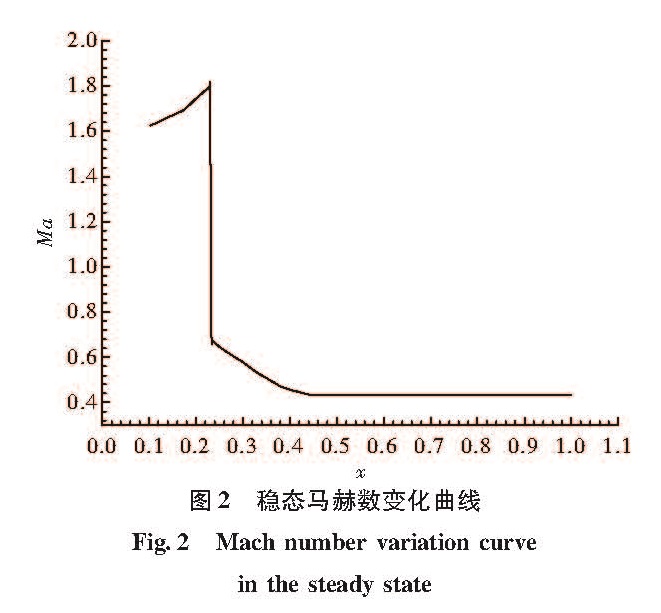
图3 不同摩擦系数下的进气道马赫数分布
Fig.3 Intake shock-position under different friction coefficients
油规律减少燃烧室的供油流量,必要时该燃油流量需要持续一定时间。如果激波仍然没有返回到安全位置,在该油量基础上进一步减少燃油流量。
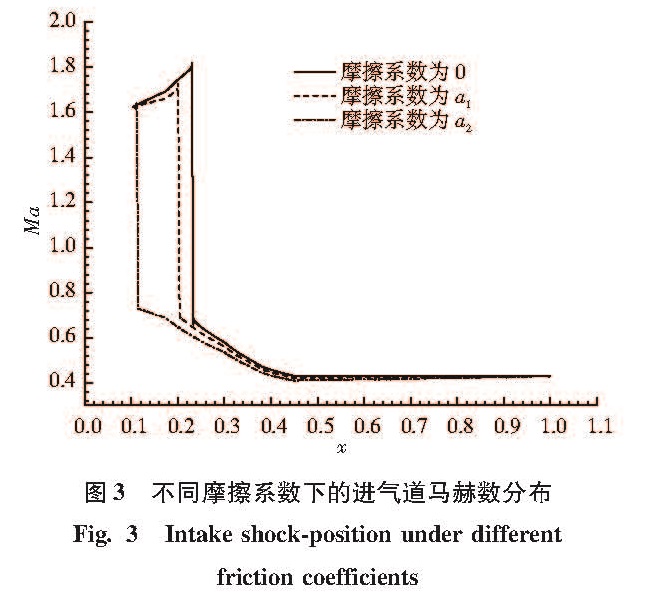
根据上述喘振控制规律的要求,流场探测装置位置应该为发动机在设计高度和马赫数时进气道工作在临界喘振裕量时的进气道结尾激波位置。由进气道吹风试验结果,在该马赫数下进气道出口压力为0.795 MPa时达到临界喘振裕量,由定常计算结果可得进气道的激波位置见图4。可以看出,发动机达到临界喘振裕度时的结尾激波位置约在距进气道头锥的相对位置为0.192,该位置就是流场探测装置的安装位置,也就是冲压发动机的喘振保护边界,此时进气道的出口平直段的马赫数约为0.454。
图4 临界喘振裕度时的马赫数分布
Fig.4 Intake shock-position in the critical buzz margin
2.2 燃烧室压力变化时进气道的压力响应特性
对于工作在某个确定状态的固定几何结构的冲压发动机来说,发动机供油流量的突然增加会导致燃烧室压力的突然跃升。这里仿真计算进气道的压力响应特性时暂不考虑燃油调节装置的控制调节时间,首先假定燃烧室压力阶跃增加。下面对不同的燃烧室压力扰动下进气道沿程压力的动态响应特性进行了研究。
在发动机设计状态的临界喘振余量下,燃烧室压力阶跃变化3%,6%及9%,图5距进气道锥尖轴向相对位置0.186处压力测点的响应情况。
该处压力测点位于结尾激波前,由图5可以看出,当进气道出口压力阶跃变化时,经过一定时间后,激波越过该测点,测点压力迅速升高。但是,不同的燃烧室压力扰动量,同一测点压力扰动的时滞是不同的。对于3%,6%及9%的压力扰动,其时间延迟分别为0.0153 s,0.013 85 s和0.013 25 s。压力扰动量越大,时间延迟越小; 压力扰动波在通道内的传播速度与当地声速和激波运动时间有关,而激波运动速度与激波前后压比关系较大,当扰动量较大时,压比较大,故激波运动速度较快,时间延迟较短。
图5 不同压力扰动幅值下进气道压力的阶跃响应
Fig.5 Intake pressure response curve under different amplitudes of pressure disturbance
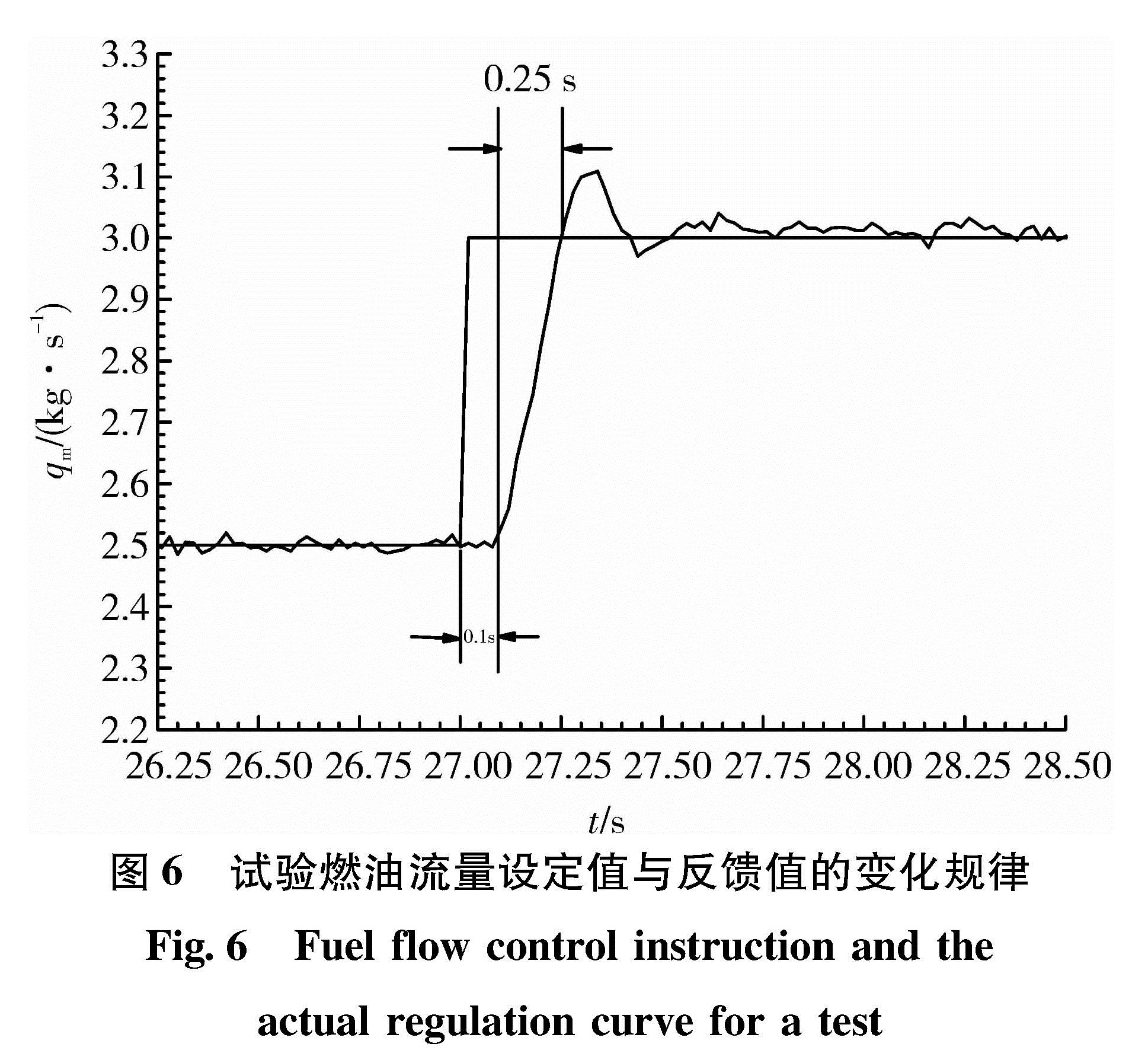
当冲压发动机实际工作时,由燃油调节指令发出到燃烧室室压爬升到额定值,该过程中室压的变化并非是阶跃增加的。图6给出了某次发动机试验中燃油流量调节指令和实际的燃油流量调节曲线,可以看出,实际燃油流量调节相对指令延迟0.1 s,从2.5 kg/s到3.0 kg/s耗时0.25 s,相对于发动机的燃油调节控制时间,进气道出口压力扰动引起的激波延迟时间几乎可以忽略不计。
图6 试验燃油流量设定值与反馈值的变化规律
Fig.6 Fuel flow control instruction and the actual regulation curve for a test
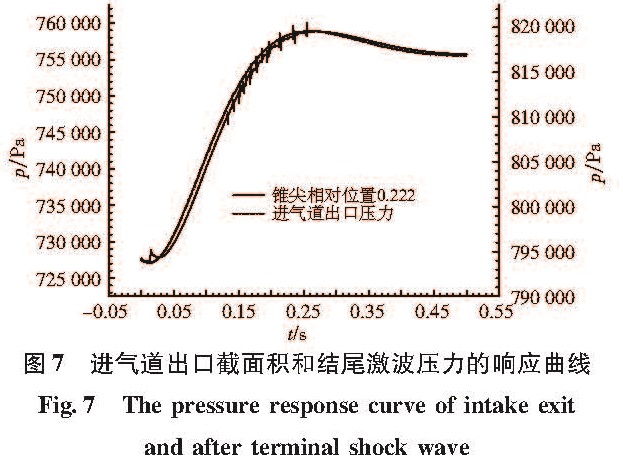
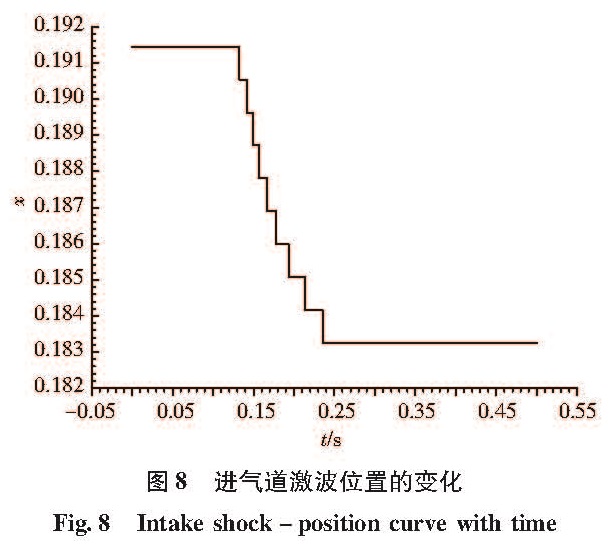
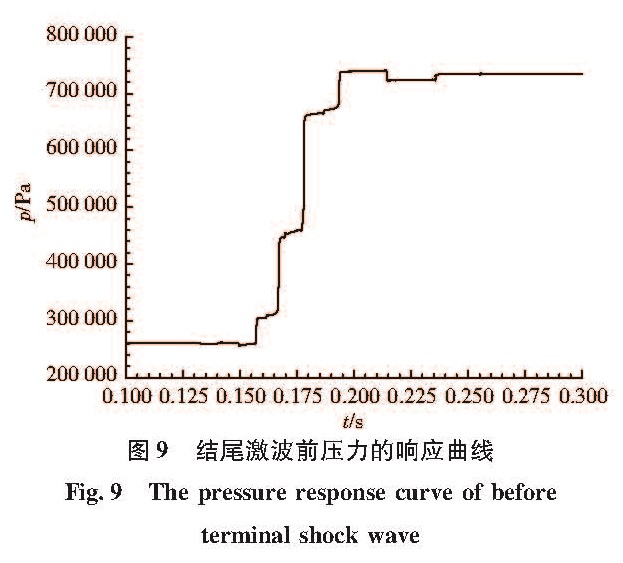
当发动机的燃油流量按一定的调节特性调节3%的进气道出口压力时,发动机进气道出口压力按图8所示的曲线进行变化。图7和图9中给出了进气道的结尾激波后(距进气道锥尖相对位置0.222处)和结尾激波前(距进气道锥尖相对位置0.186处)的压力变化曲线,图8给出了激波位置随时间变化曲线。
由计算结果可以看出,当进气道出口压力按发动机供油控制的某调节特性变化时,结尾激波后的压力可以迅速响应,其变化趋势与出口压力基本相同。但是,结尾激波前的压力在出口压力开始爬升0.15 s后才开始爬升,结果表明燃烧室压力变化缓慢时,激波向前的运动速度较慢。也就是说,如果燃烧室的燃油供应量增大,从燃油流量开始增大到流场探测装置监测到激波越过流场探测装置所需的时间较长,一旦判断出激波越过流场探测装置,也会有较长的反应时间来减小油量,从而使激波重新回到安全位置。
2.3 喘振控制仿真计算
当发动机的燃油流量增大,燃烧室压力提高,进气道结尾激波越过流场探测装置后,意味着发动机即将发动机喘振,此时需要降低发动机燃烧室的供油流量。喘振控制规律需要确定激波越过流场探测装置后的供油流量减小比例以及燃油流量减小的快速性,以给发动机控制系统设计提供参考。
图7 进气道出口截面积和结尾激波压力的响应曲线
Fig.7 The pressure response curve of intake exit and after terminal shock wave
图8 进气道激波位置的变化
Fig.8 Intake shock-position curve with time
图9 结尾激波前压力的响应曲线
Fig.9 The pressure response curve of before terminal shock wave
在发动机设计状态,进气道结尾激波位于距锥尖0.20的相对位置,进气道处于超临界工作状态。发动机在此工作状态下,先使进气道出口压力按燃油调节的额定速率爬升; 当流场探测装置判断出激波越过流场探测装置后,进气道出口压力按额定速率下降。
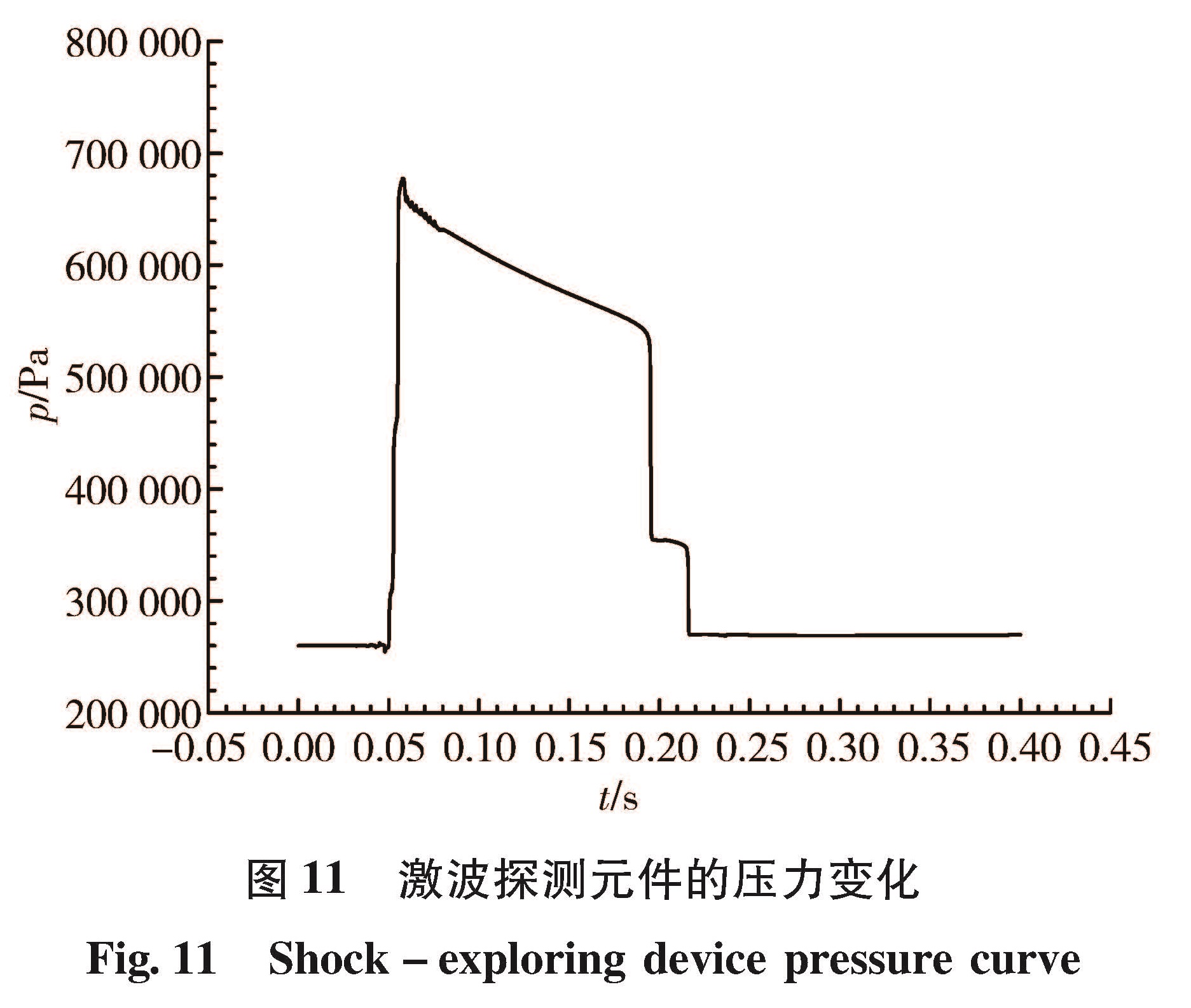
图 10和图 11给出了进气道出口压力变化曲线、进气道内流场探测装置处的压力变化曲线。由计算结果可以看出,发动机进气道出口压力先爬升,当流场探测装置判断出激波越过流场探测装置后,进气道出口压力下降,减小幅度为当前压力的3%,进气道出口压力变化曲线见图 10。从图 11可知,进气道结尾激波在0.055 s后越过流场探测装置,控制系统捕捉到激波越过流场探测装置后,进气道出口压力开始降低,激波位置继续前移至距进气道锥尖相对位置0.186处,0.215 s后激波回到安全位置,从判断激波越过流场探测装置到控制激波回到安全位置的时间为0.165 s。由流场探测装置处的压力变化可以看出,激波越过流场探测装置后,该处压力有一个突然跃升,之后,由于背压开始降低,此处压力也开始逐渐降低,直到激波退回时越过此点,此处压力有突然下降。
图 10 进气道出口压力变化曲线
Fig.10 Intake exit pressure curve
当流场探测装置监测到激波进入危险区后,燃烧室供油流量如果采用加速电磁阀快速调节迅速下降,减小幅度为当前压力的3%,则整个激波位置的控制时间减小到0.05 s,见图 12和图 13。
图 11 激波探测元件的压力变化
Fig.11 Shock-exploring device pressure curve
图 12 不同燃油流量变化率时进气道出口压力的变化
Fig.12 Intake exit pressure curves comparsion
图 13 激波探测元件的压力响应曲线对比
Fig.13 Shock-exploring device pressure curves comparsion
上述仿真计算中,进气道出口压力爬升规律均是以PWM电磁阀的额定调节能力进行确定的。如果导弹或飞行器的机动推力需要快速增大,此时需要开启加速电磁阀,大速率增加燃油流量,当激波越过流场探测装置边界时,燃油流量以额定速率的减小,进气道出口压力下降幅度为原压力的3%,4%,5%及6%,如图 14所示。
图 15给出了流场探测装置处的压力曲线,图 16给出了激波位置曲线,从中可以看出,当发动机燃油流量快速增大、进气道出口压力迅速跃升时,进气道结尾激波位置前移速度加快,0.02 s后激波越过流场探测装置,前移至约0.175的相对位置。此时,进气道的出口压力开始降低,如果降低的幅度较小(3%和4%),激波位置往后端运动一段距离(相对位置0.180,0.187),但并不能使激波重新回到流场探测装置后的安全位置。只有进气道出口压力降低到一定的幅度之后(5%),进气道的结尾激波才能回到安全的位置。出现上述现象的主要原因是进气道结尾激波向后越过探测元件回到安全位置的压力(0.786 MPa)要远低于激波向前越过探测元件的压力(0.827 MPa),激波前后运动存在压力迟滞环现象。
图 14 不同变化幅值时进气道出口压力的响应特性
Fig.14 Intake exit pressure curves of different deceased amplitudes
前个算例在计算时没有考虑发动机燃油供应控制调节系统的延迟时间,根据试验结果取该时间为0.1 s。考虑延迟时间后,进气道出口压力跃升仍按加速电磁阀快速调节速率调节,压力下降仍以燃油流量额定速率减小,仿真结果见图 17和图 18。可以看出,当进气道出口压力上升至0.854 MPa时越过流场探测装置,此时进气道出口压力仍持续上升,在0.05 s时升至最大0.863 MPa,此时激波位置也前传至距锥尖相对位置0.132,约0.1 s时进气道出口压力开始下降,但激波并没有马上后移,而是到0.14 s时才开始后移,当进气道出口压力降低到当前进气道出口压力的9%(即0.79 MPa)及以上时激波才再次越过流场探测装置回到安全位置。可以看出,发动机燃油系统的延迟作用使激波前后运动存在压力滞环现象更为明显。
图 15 不同变化幅值激波探测装置处的压力变化曲线
Fig.15 Shock-exploring device pressure curve of different deceased amplitudes
图 16 不同变化幅值时激波位置曲线
Fig.16 Intake shock-position curve of different deceased amplitudes
上述仿真计算了当发动机燃油供应控制系统以额定、快速调节速率调节燃油流量进气道出口压力爬升和下降时,进气道内结尾激波的响应情况,可以看出:
使用PWM电磁阀额定调节燃油流量与使用加速电磁阀快速调节燃油流量相比,进气道出口压力爬升时间常数从0.055 s降为0.02 s,激波越过喘振边界耗时从0.05 s降为0.025 s,进气道结尾激波向唇口方向运动的相对位移从0.186降为0.175,进气道出口压力的最大值从0.814 MPa升至0.827 MPa,使激波控制回安全区域,进气道出口压力需要更大的降低幅值(从3%增至5%),然而当激波控制回到喘振边界范围的安全区域后,进气道出口压力的绝对值基本一致,约为0.79 MPa。
图 17 不同变化幅值进气道出口压力和激波位置曲线
Fig.17 Intake exit pressure and shock-position curve of different deceased amplitudes
图 18 不同变化幅值时激波探测装置处压力变化曲线
Fig.18 Shock-exploring device pressure curve of different deceased amplitudes
当考虑发动机燃油供应控制系统的延迟时间后,进气道出口压力升至更高的0.854 MPa,结尾激波越过喘振保护边界后进一步往危险方向运动,结尾激波的相对位移从0.175移至0.132,此时需要大幅降低当前进气道出口压力值(9%),直到进气道出口压力值达到约0.79 MPa时,激波才控制回到喘振保护边界范围内。