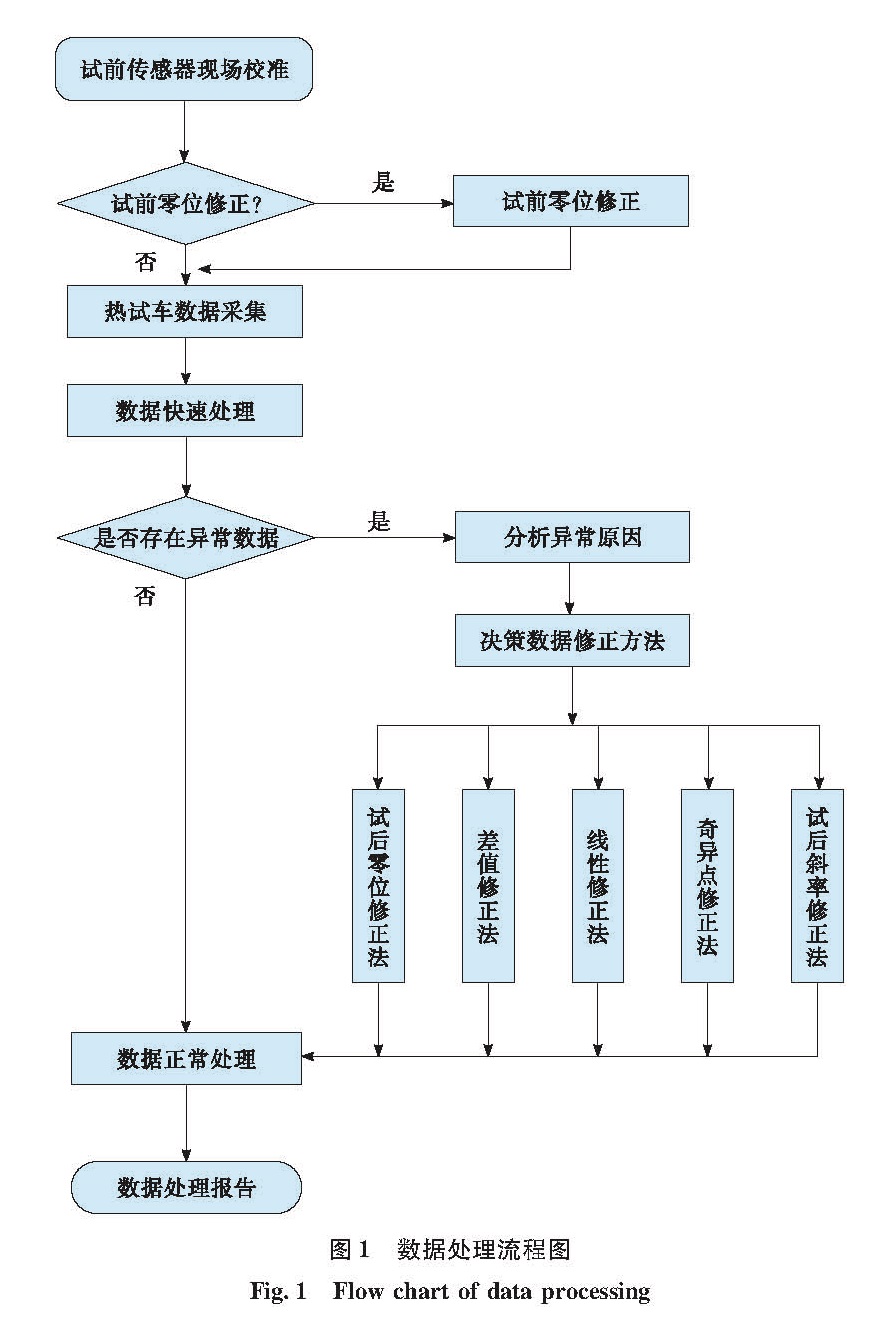
3.1 数据修正原则
测试异常数据无论采用何种修正方法,均应遵循如下原则:
1)及时修正:若存在异常测试情况,应尽快查明原因,在不破坏试车测试状态的情况下,对其进行及时修正;
2)合理修正:针对异常测试情况,确认符合修正条件,采取合适的数据修正方法对其修复;
3)准确修正:对于一些复杂情况,单靠某种修正方法是很难有效的,需要采用多种方法分别修正,使其真实反映发动机工作特性;
4)不修正:在测量系统正常的情况下,对于一些原因不明确或无法验证的情况下所出现的偏差较大的数据,一般不轻易对其修正,避免影响发动机的真实工作情况。
3.2 试前零位修正法
测量系统误差通常在某一特定的范围内是相对固定且可控的,但传感器测量通道零位变化却是不可控制的,有时达到较严重的程度,严重影响了试车数据的准确性。通常情况下影响测量零位变化的因素较多,如试车架、传感器、测量线缆、测量设备等。试车前通过对整个试验过程的实时监测,结合零位状态记录数据,分析数据曲线变化趋势,可确定引起测量零位变化的主要原因,然后采用试前零位修正法对其进行修正。
试前零位修正法是最基础、运用最为广泛的一种修正方法,常用于推力、压力、电流参数,主要解决测量传感器零位漂移引起的数据漂移的问题。试前零位的漂移量可能是正方向、也有可能是负方向,与真实值相比数据或大或小。
从历次试车的零位漂移统计情况来看,温漂变化是传感器零位漂移的主要因素之一。对于此类情况,应真实模拟试车工作环境并对传感器进行现场校准,即可确定传感器随环境温度变化的关系,其标定原理如下:
对线性测量系统、校准数据采用最小二乘法拟合成校准线。
y=a+bx(7)
式中:y为校准时加的标准值; x为测量系统输出值; a为传感器校验截距; b为传感器校验斜率,MPa/mv。
校准系数用下式求出:
a=y--bx-(8)
b=(nxiyi-xiyi)/(nx2i-(xi)2)(9)
y=(nxiyi-xiyi)/(([nx2i-(xi)2][ny2i-(yi)2])1/2)(10)
式中:y-=(∑ni=1yi)/n; x^-=(∑ni=1xi)/n; n为校准分档档数; xi为校准时测量系统的记录值; yi为校准时每一档所加的标准值; �SymbolgA@�为两变量之间的相关系数。
除了温度影响因素外,大气压环境对传感器零位也有一定的影响。在开展高空模拟试车任务时,测量系统通常采用关舱前的零位值,它是在标准大气环境下记录的零位值。当真空舱处于高真空状态下,测量传感器、试车架及系统管路等试验设备因受环境压力变化的影响,导致开车前参数零位出现偏差。试后数据处理时,为了将该类影响降至最低,一般取点火前(开车前0.5 s)数据u0的均值作为零位修正。压力计算方法如下:
p=b(us-u0)+pH(11)
式中:p为压力零位值,MPa; us为试车过程采集的压力数值,mv; u0为零位电压输出值,mv; pH为大气压强,MPa; b为校准斜率,MPa/mv。
下面以某型号发动机试验室压测量参数为例说明该修正原理。
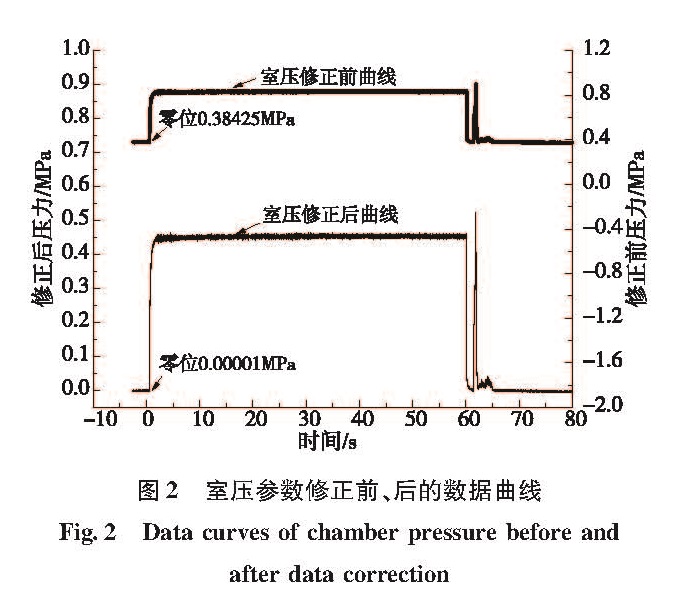
在某次试车过程中,由于室压传感器经过多次脉冲程序试验后,传感器应变片因温度变化和多次冲击发生形变,不能及时回到初始状态,此时测量传感器的零位输出值已严重偏离正常值,需要对传感器的零位数据进行必要的数据修正。
传感器在经过多次脉冲压力的冲击下,室压参数零位物理量由原始的0.000 01 MPa变化为0.384 25 MPa,导致发动机工作段均值与真实状态比较抬高了0.384 24 MPa压力。通过试前零位修正方法,即可还原试车真实点火工作数值。试验数据修正前后曲线对比见图2。
图2 室压参数修正前、后的数据曲线
Fig.2 Data curves of chamber pressure before and after data correction
3.3 试后零位修正法
影响传感器零位变化的因素较多,应结合实际情况,采取相应方法对其进行修正。试后零位修正法也是一种广泛应用的修正方法,常用于推力参数、压力、电流参数,该方法一般不会单独用于试验数据处理中。通常试验数据在进行了试前零位修正后,若存在试后零位与试前零位偏差过大以及发动机试验点火数据与实际理论计算值偏差过大的情况时,就需要采用试后零位修正法,可将试后1秒内传感器零位电压值u0的均值作为零位值参与计算。
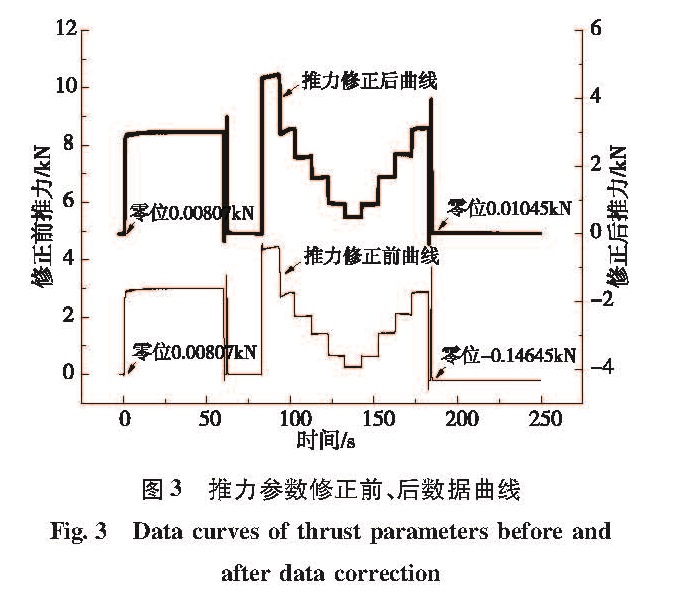
某发动机试验过程中,受产品推力架的影响导致推力传感器零位数据变化较大,推力零位数据随试验时间的延长而逐渐增大。针对这一情况,需要计算出每个点火工作段后推力参数零位的具体变化量,并对每一次点火过后的间歇段推力传感器零位数据进行比较,然后结合产品设计理论值对该程序点火过程中的推力瞬时数据进行试后修正,以反映发动机点火时段推力参数的真实状态,试验数据修正前后曲线对比见图3。
图3 推力参数修正前、后数据曲线
Fig.3 Data curves of thrust parameters before and after data correction
由推力参数修正前、后数据曲线可知,推力参数经过修正后,传感器零位值相对稳定,表明推力数据修正是有效的。
3.4 差值修正法
差值修正法常用于对热试车发动机入口压力、喷前压力参数的修正,主要利用试验系统中多路测量参数之间的固定压力差值进行修正。目前,姿控发动机试验在预研阶段试车中通常会在介质入口管路安装传感器,在热调试过程中作为监测点了解发动机内部压力状态变化过程。发动机入口压力位置环境温度变化较大,传感器输出信号受温度影响有较大的变化。由于管路压降是一个固定数值,根据以往的试验经验,取点火前0.5 s平均值,通过计算求出每次热试车点火过程介质箱压与对应管路介质入口的压力差值。由于第一次点火属于冷起动,加之工作时间相对较短,默认第一次点火试验箱压和入口压力数据准确可信,以此为基础计算后续每次点火相对第一次点火压力差值来进行修正(忽略储箱介质液位变化引起的液柱压力变化 )。其计算原理如下:
Ai=pii-pti(12)
A1=pi1-pt1(13)
Bi=Ai-A1(14)
pici =pii- Bi(15)
式中:i为点火序号; pii为第i次点火试验入口压力,MPa; pti为第i次点火试验介质箱压力,MPa; A1为第一次点火前0.5 s入口压力与箱压的差值,MPa; Bi为第i次点火修正量,MPa; pici为第i次点火试验入口压力修正后数据。
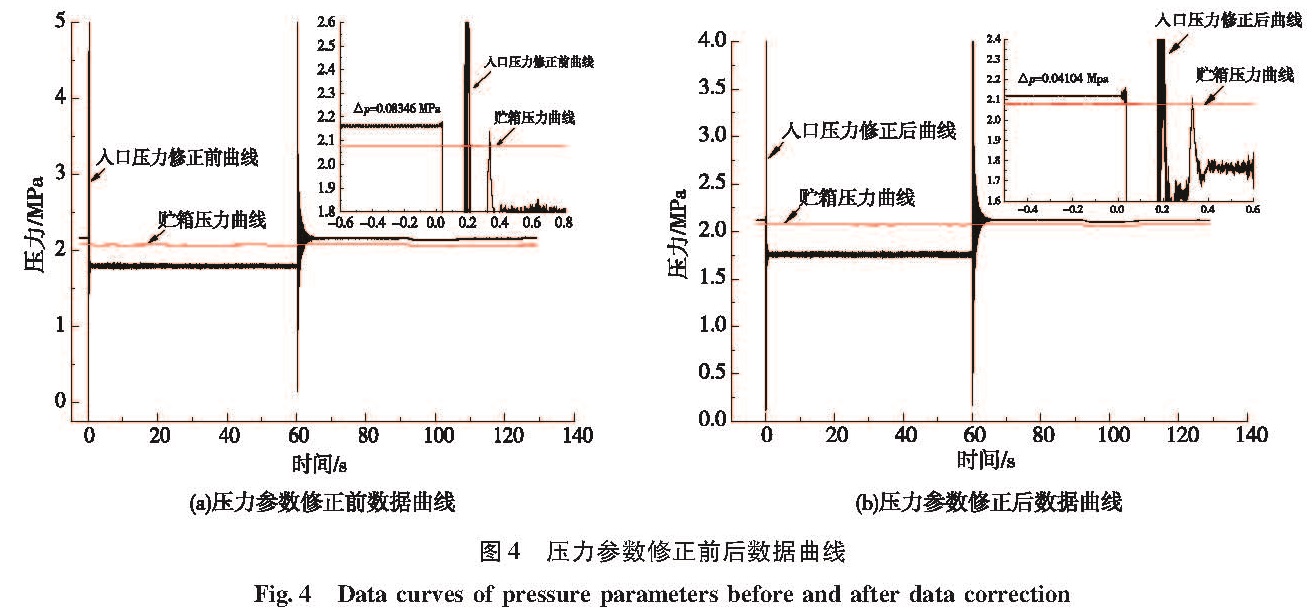
以某次地面单机试验介质入口压力参数为例进行说明,见图4所示。通过对系统入口压力的实时采集,介质箱压参数因受环境影响较小,试验过程中数据相对稳定,故以此作为基准计算相对压力差。通过计算结果可以对试验系统中的固定压力差有一个较准确的值。本次试验共进行了12次点火,以下仅以第12次与第1次进行数据比较,对系统管路入口压力、介质箱压力参数进行修正,试验数据修正前后曲线如下(△p为系统管路入口压力与介质箱压力差值)。
图4表明:由于试验系统相对固定,系统压力差为一个相对固定的数值,如果偏差过大必然存在传感器数据漂移现象; 经修正后,每种工况条件下点火数据中管路系统压力差近似等于一个固定值,消除了因为传感器漂移带来的测量数据误差,确保了试验数据的准确性。
图4 压力参数修正前后数据曲线
Fig.4 Data curves of pressure parameters before and after data correction
3.5 线性修正法
线性修正法运用广泛,适用于压力、推力参数的修正。姿控发动机试验过程脉冲次数多、工作时间长,温度变化快对零位漂移的影响大。测量系统中的传感器零位输出受温度影响因素复杂,很难得出传感器输出与温度变化的数学模型。当环境温度变化大于10 ℃时,传感器输出的变化量已经影响到测量系统的精度。通过分析以往的测量数据,发现零位数据会随着时间的延长而不断增大,传感器应变片所处的温度场不均匀、应变片的灵敏度系数会随温度发生变化,温度引起测量线缆电阻变化及电桥应变片电阻变化等都是传感器输出产生温漂的原因。
试验测试数据表明,发动机长时间连续工作或几百次脉冲工作都会对传感器零位漂移造成较大的影响。除了从试验数据处理中找出一定规律性以外,还需要运用合理的数据处理方法对测量数据进行零位修正,在一定范围内有效减小传感器零漂对试验数据造成的测量误差。
根据历次热试车特点和经验,一般经过10 s以上的热试车或者50个脉冲工作点火后,会不同程度地出现传感器零漂现象。在发动机试验缓变参数测量中,由于传感器本身的动态性能和响应速度具有一定的局限性,一般零漂以线性漂移来计算。因此,在修正过程中分别取起始段的零位p1(t1,p1)和关机段的零位p2(t2,p2)利用Origin工具拟合线性方程,求出传感器线性漂移变化率b系数。在测量原始数据的基础上计算出根据时间累计得到的线性漂移量,随后将不同时刻数据用与之相对应的漂移量来进行修正。具体计算过程根据实际数据曲线可以采用单个斜率或者多个斜率进行分段修正,最终得出试验数据及修正结果。这种针对发动机连续工作或几百次脉冲工作数据进行的修正值对测量精度影响约为千分之一,效果比较理想。其计算原理如下:
p1=A+B t1(16)
p2 =A +B t2(17)
式中:p1为起始段的零位值; t1为起始段的零位值对应的时刻,s; p2为关机段的零位值; t2为关机段的零位值对应的时刻,s; A为拟合截距; B为拟合斜率。
在瞬时数据中利用公式
pici =pi-(Time-t1)*B(18)
式中:pi为压力参数修正前第i个数据; Time为时间轴,s; pici为压力参数修正后第i个数据; t1为起始段的零位压强值对应的时刻,s。
该方法在进行数据修正时默认试验数据漂移量为线性变化。
图 5为某型号推力室室压参数长程点火试验数据修正前后曲线对比。
图5 压力参数修正前后数据曲线对比
Fig.5 Data curves of pressure parameters before and after data correction
3.6 奇异点修正法
奇异点数据修正法主要用于流量、转速参数的修正。流量和转速参数为频率量信号,易受外界测量干扰的影响,导致测试数据中出现异常数据(奇异点),使试验结果与真实数据存在较大的偏差。对于试验瞬时数据,异常数据通常是某个极大值或极小值。在第一步的预处理过程中,采用3.3中数据取舍准则对其进行甩点处理,若仍有异常点(如下图6),则需要对传感器进行重新标定,确认传感器工作正常,标定结果无异常,确认测试数据存在干扰信号。此时,采用固定的程序设置将这些瞬时异常数据用该处理段的均值替代。
图 6为某次试验点火过程中流量参数试验数据修正前后曲线对比。
图6 流量参数修正前后数据曲线
Fig.6 Data curves of flow-rate parameters before and after data correction
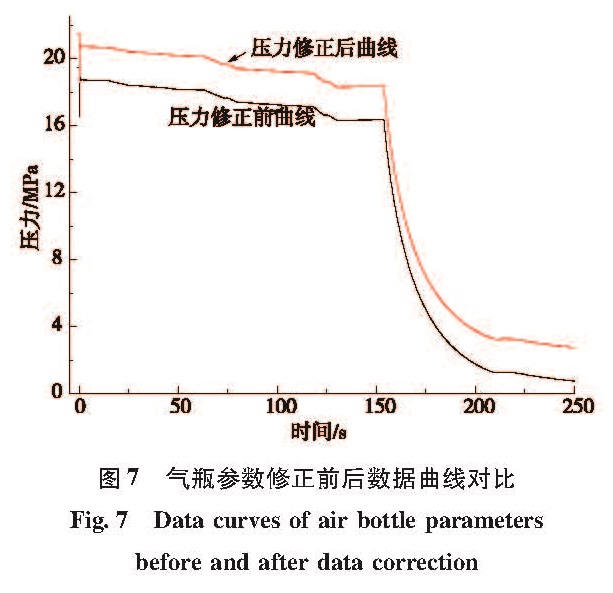
3.7 试后斜率修正法
斜率修正法用于压力、推力、流量等参数,在试车过程中,由于传感器自身原因或外界因素引起传感器输出失常,使得试验数据严重偏离正常值,无法提供正常试验数据。此类情况需要在试验结束后,重新对传感器进行现场校准,得出新的校验系数,将其带入数据处理程序,对原始试验数据进行重新处理,以确保真实的试验数据。
图 7为某次整机试验气瓶参数数据修正前与试验结束重新标校修正后曲线对比,修正后的气瓶压力数据比修正前相差2 MPa。
图7 气瓶参数修正前后数据曲线对比
Fig.7 Data curves of air bottle parameters before and after data correction