收稿日期:2017-03-27
基金项目: 国防技术基础科研项目(JSJL2014203B015)
作者简介: 寇 鑫(1989—),男,工程师,研究领域为液体火箭发动机试验工艺系统设计
基金项目: 国防技术基础科研项目(JSJL2014203B015)
作者简介: 寇 鑫(1989—),男,工程师,研究领域为液体火箭发动机试验工艺系统设计
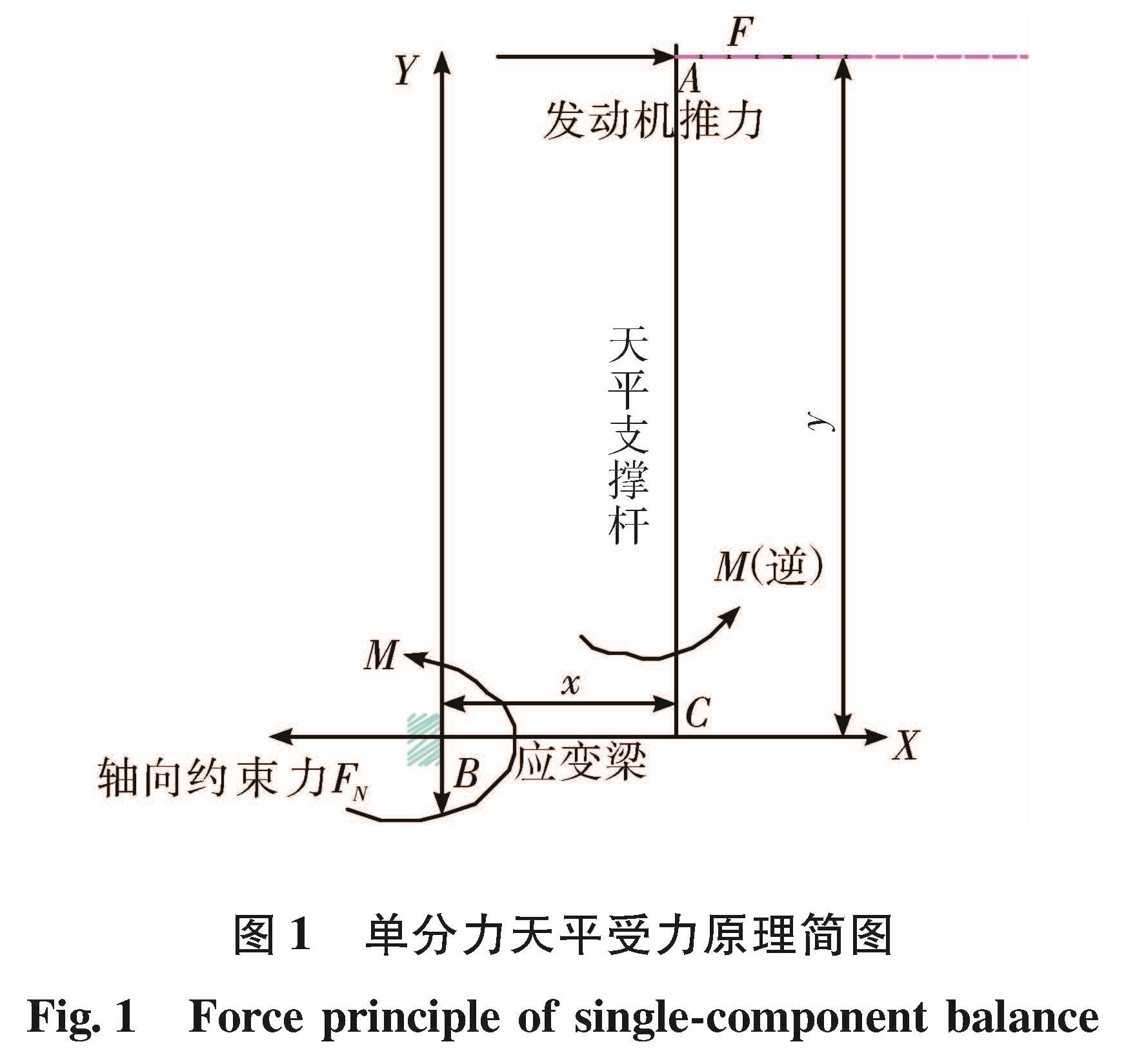
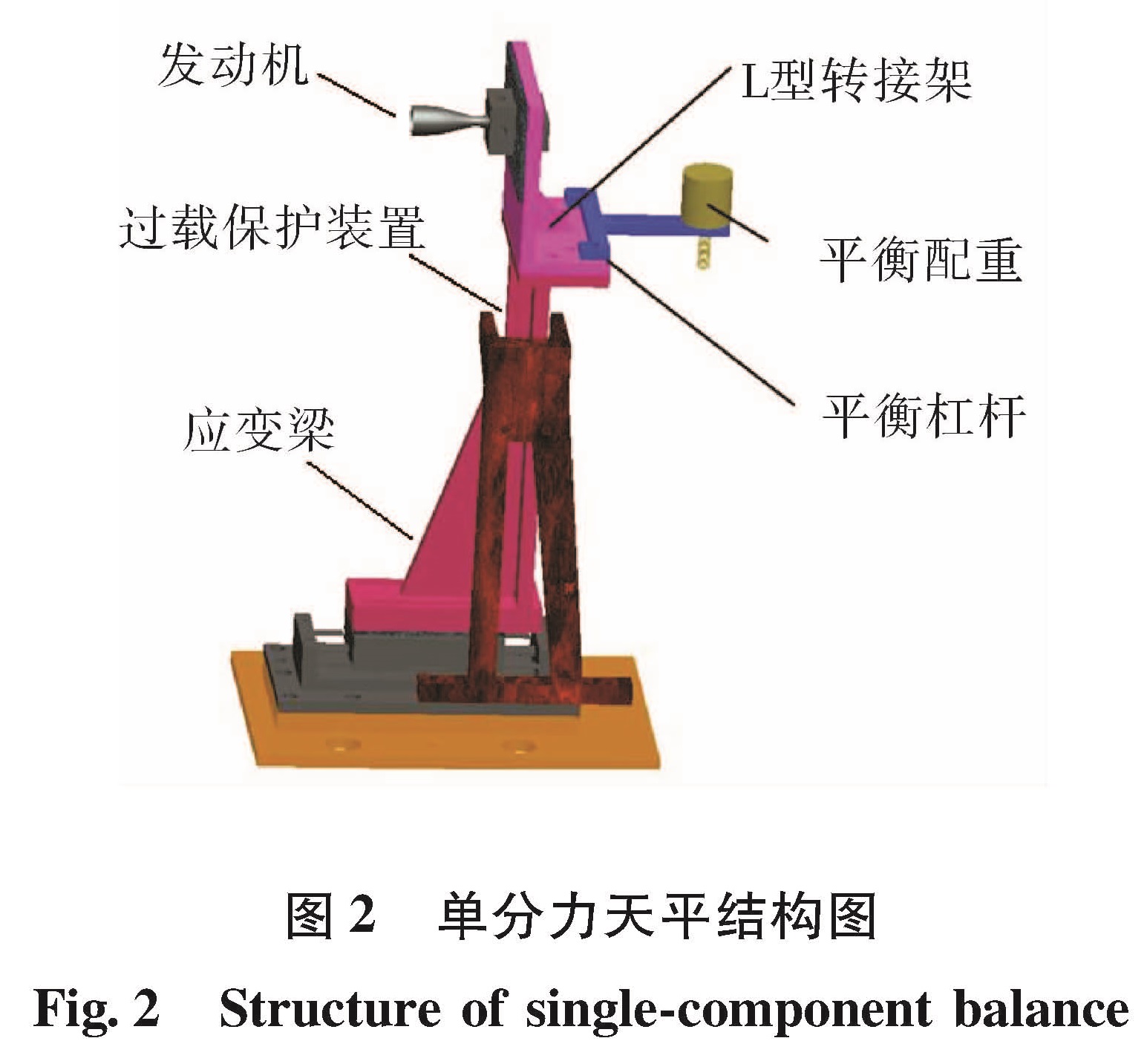
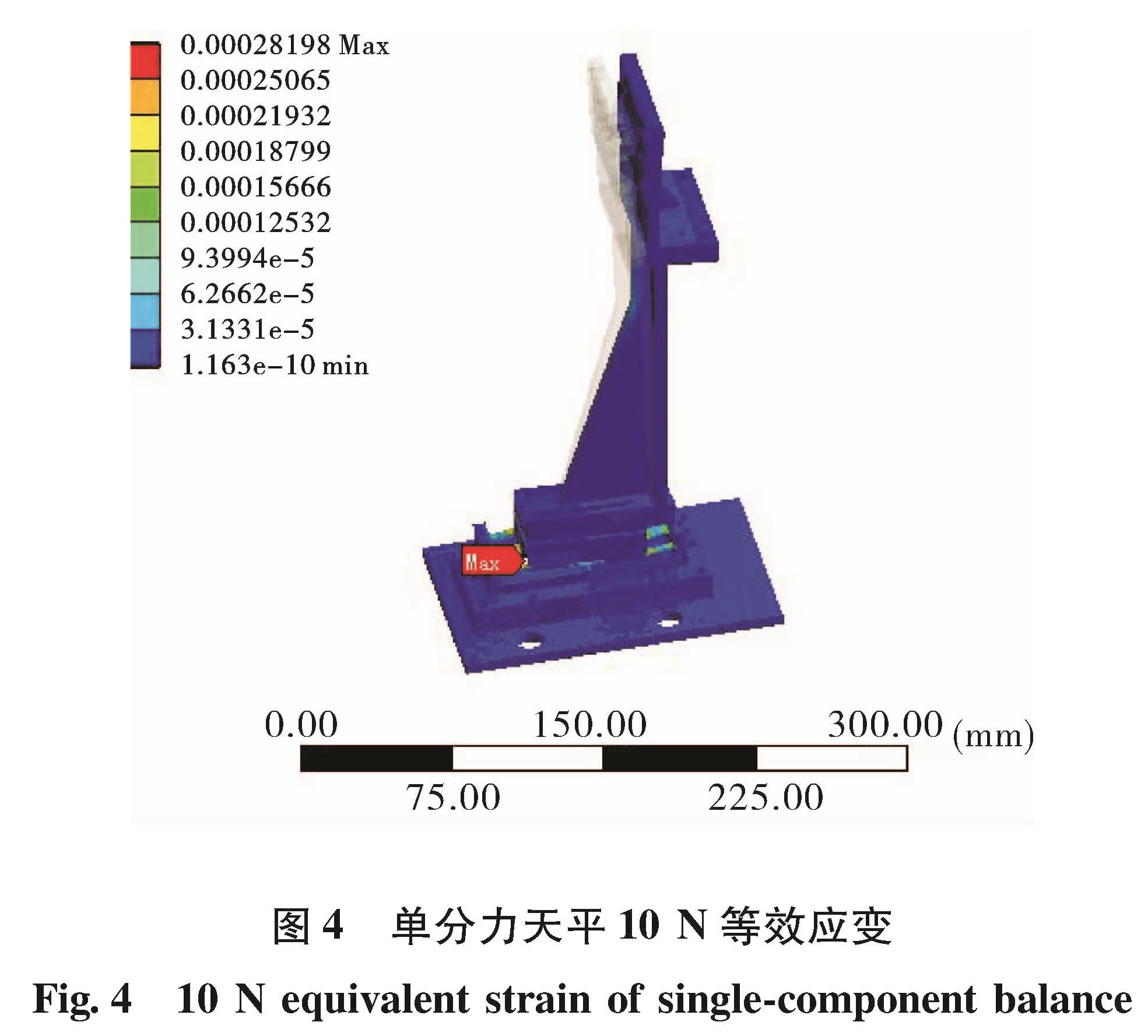
对比传统测量方式,提出用单分力天平测量小发动机推力的方法。通过对单分力天平和传统测量小推力的方式进行的有限元仿真分析,体现了单分力天平在4~25 N量级小推力测量中的优势。设计了稳态推力测量校准一体化装置,在不同环境温度条件下对单分力天平进行推力校准与测试,验证了单分力天平在姿控发动机小推力测量中应用的可行性。
As compared to the traditional testing method,using single-component balance measuring the thrust of small engine is proposed. The advantage of the single-component balance in measurement of 4~25 N small thrust engines is confirmed by FEM simulation analysis of single-component balance and traditional measuring methods. An integrated device of steady state thrust measurement and calibration was designed. The thrust calibration and test of the single-component balance were performed under conditions of different environment temperatures,by which the application feasibility of the single-component balance for the small thrust measurement of the attitude engine was verified.