4.1 机组结构和热控状态
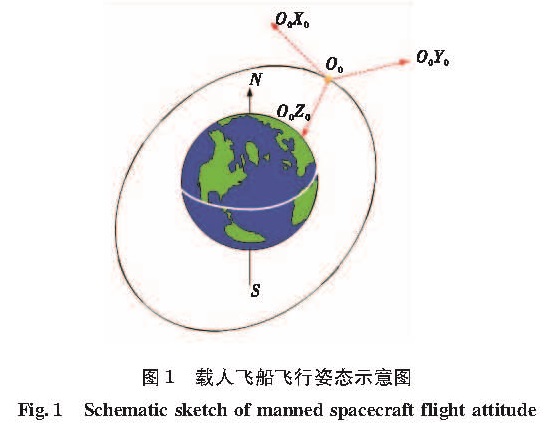
轨控机组由4台轨控发动机组成,处于推进舱尾部中央位置,其周边由高温隔热屏、舱壁多层组件形成半包围结构。高温隔热屏朝向舱内部分为承力截锥部件,轨控机组的上半部分(即轨控发动机的头部和电磁阀)位于推进分系统的承力截锥结构环境内,其示意图见图2,热控状态见表1。
图2 载人飞船尾部俯视图
Fig.2 Schematic sketch from the back of manned spacecraft
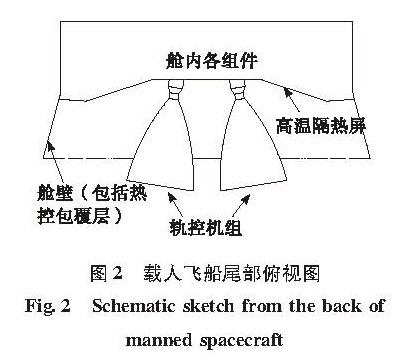
表1 轨控机组热控状态汇总表
Tab.1 Summary table of thermal control design for the divert thruster unit
4.2 热模型描述
影响轨控机组温度场的组件主要为轨控发动机、发动机的进口管路、轨控机架、高温隔热屏、锥形舱壁多层组件、承力截锥组件。建立物理模型包括轨控发动机、发动机的进口管路、轨控机架、高温隔热屏、锥形舱壁多层组件和承力截锥组件。为同时保证有限元模型的准确性和合理有效网格数量,将各组件模型逐一进行简化[4]:轨控发动机除忽略螺纹孔及少数倒角外其余按发动机的实际尺寸建模; 高温隔热屏和锥形舱壁的按实际尺寸建模; 承力截锥由于包括了贮箱等多组件,但实际计算过程中只需考虑其表面的热控状态对轨控机组可见组件的影响,因此将承力截锥按最大外缘尺寸将其等效为一锥形平顶薄壁结构; 发动机进口管路,将所有的管路简化为三段液路管路。
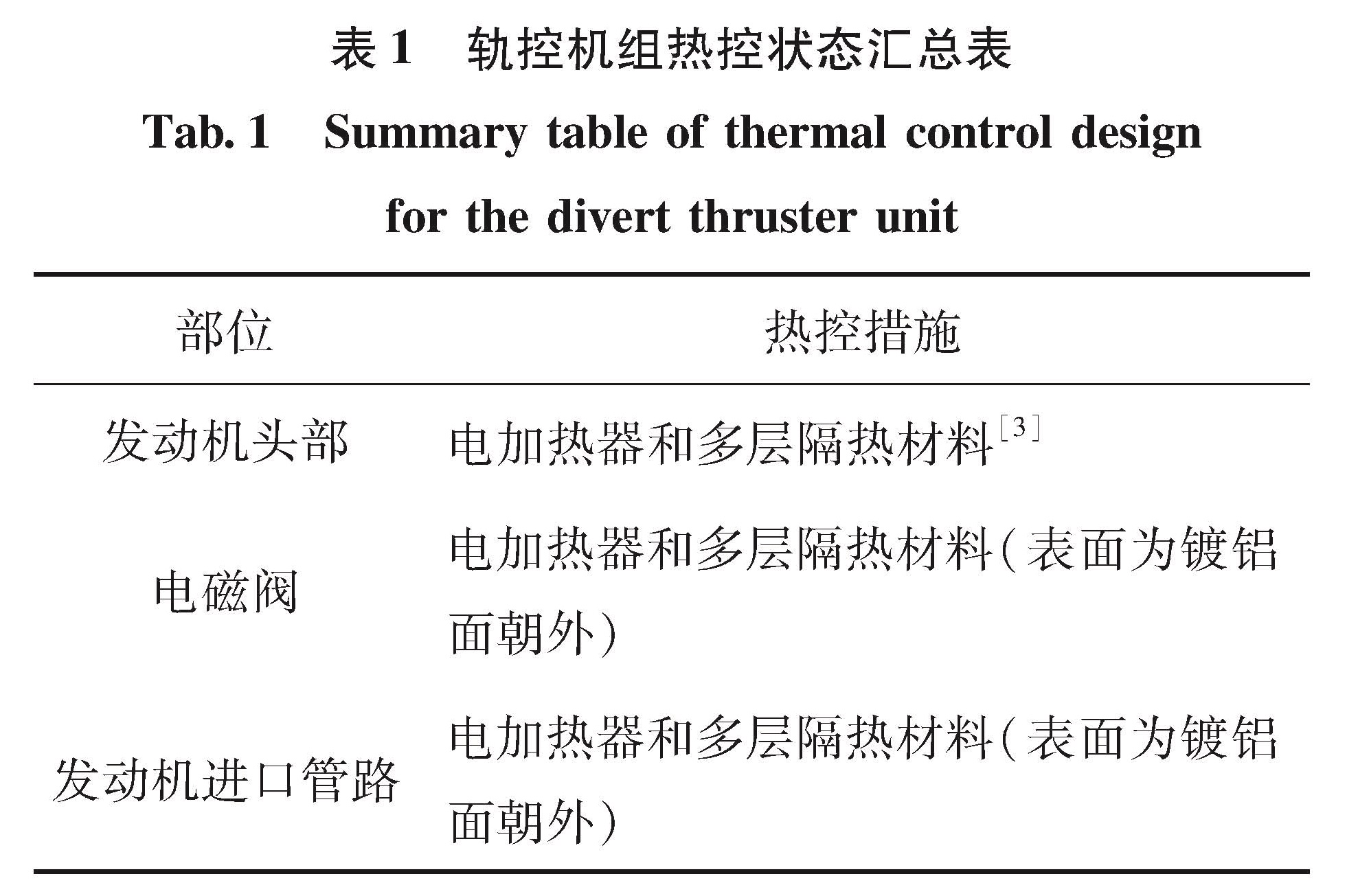
用I-deas的Simulation的Master modeler为轨控发动机等组件建立模型。有限元分析中,由于各组件形状不规则并且存在薄壁结构,因此网格化是一项重要复杂且困难的工作。为保证热分析仿真计算的准确性和模拟精度,每个组件均有不同大小的体单元,表面覆盖零厚度的直线型三角壳单元,分别赋予组件各自材料的热物理性质[5],总共生成32 233个节点和75 811个单元,形成有限元模型,见图3。
图3 轨控机组有限元模型图
Fig.3 Finite element model of divert thruster unit
4.3 边界条件和轨道设置
边界条件根据该模型的具体应用情况分为温度、热耦合、辐射、热流和轨道设置:①空间背景温度4 K,软件自动将舱壁空间处理为由6个巨大的温度恒定的正方形单元组成的六面体,该六面体与模型中各辐射面之间组成封闭体; ②发动机喷管与法兰盘联接方式为焊接,法兰盘与电磁阀通过螺钉以及内部的密封圈接触,因此接触面之间设定接触热阻[6]; ③所有表面均参与辐射,有限元模型中根据各组件的相对位置设定不同形式的辐射关系; ④边界温度:连续偏航工况下,根据系统仿真计算结果,舱壁最高温度和承力截锥表面温度分别取40 ℃和30 ℃; ⑤热流条件:这里以轨道设置来实现,外界热流包括太阳辐照热流、地球对太阳的反照热流和地球红外热流。由于该热分析针对在轨飞行中推进舱尾对日连续偏航模式,根据实际在轨运行的情况,太阳β角在25°到65°之间变化,因此计算中定义一个轨道运行模式,取太阳β角25°和65°,以上热流自动施加在有限元模型中,有限元模型轨道示意见图4; ⑥发动机进口管路端面与电磁阀表面设置热耦合,总管路一段由于接近环形管,由于位置关系,其主要与承力截锥进行热传导和辐射,认为最高温度不会超过承力截锥最高温度,所以设定该段管路在连续偏航姿态下温度为30℃(由承力截锥温度30℃而定)。软件据以上边界条件运算根据需要进行稳态温度计算。
图4 连续偏航在轨飞行姿态下轨道模型图
Fig.4 Orbit model diagram under continuous yaw attitude
4.4 现有热控状态评估
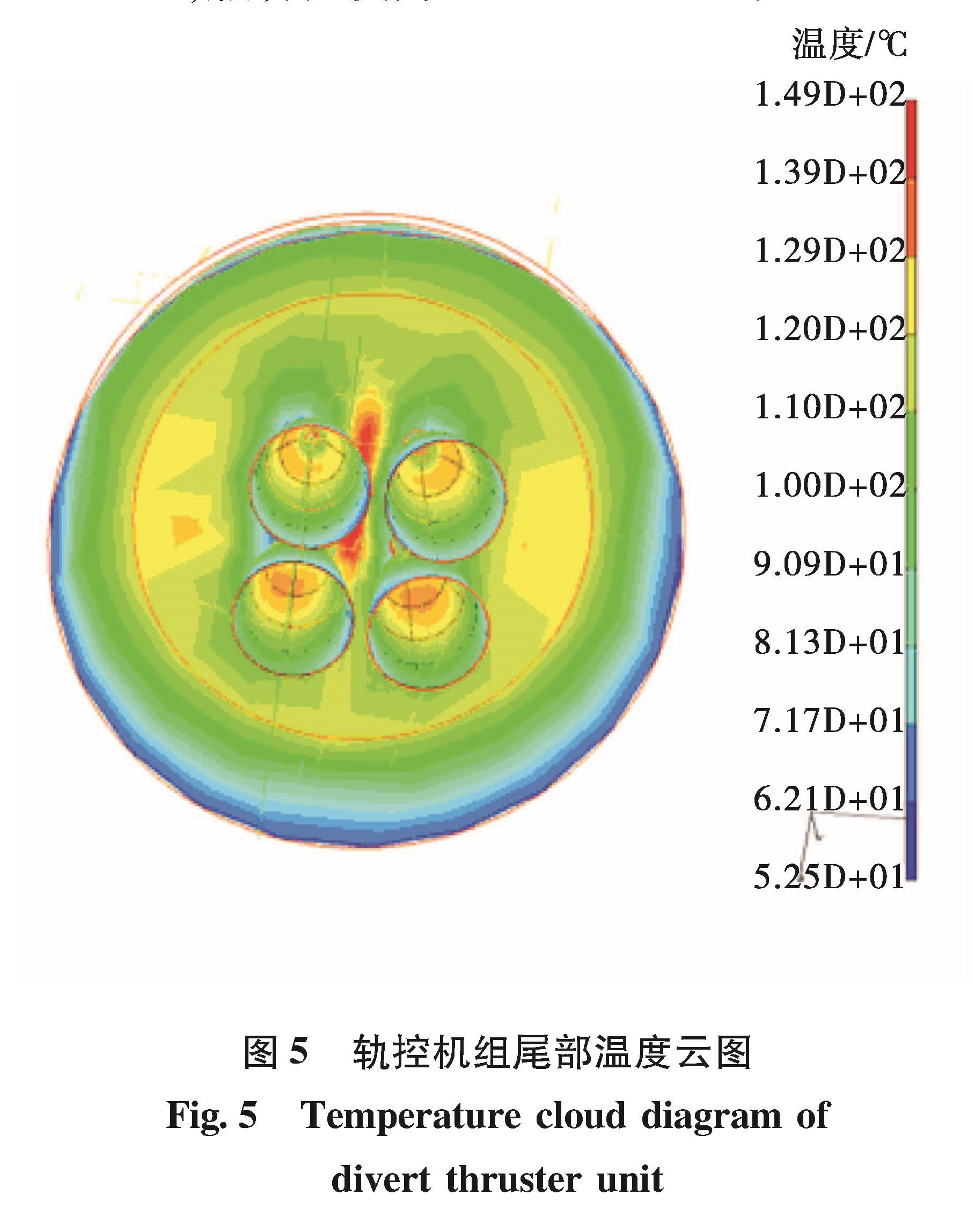
对于在轨飞行的航天器来说,太阳入射角是非常重要的参数,其表示太阳光线与轨道面之间的夹角[7],不同的太阳入射角[8]对应的轨道周期受晒因子不同,太阳入射角越大,受晒因子越大[9],因此考虑飞船在轨道周期内经受的最大太阳热流对其的影响,选定飞船所有轨道周期内最大的太阳角65°,在该太阳角下对飞船连续偏航飞行姿态下的高温工况进行热分析计算。在连续偏航飞行姿态以及相应的边界条件可得到不同工况的温度结果,图5和图6为轨控机组在原热控状态下的连续偏航飞行姿态下的温度云图。
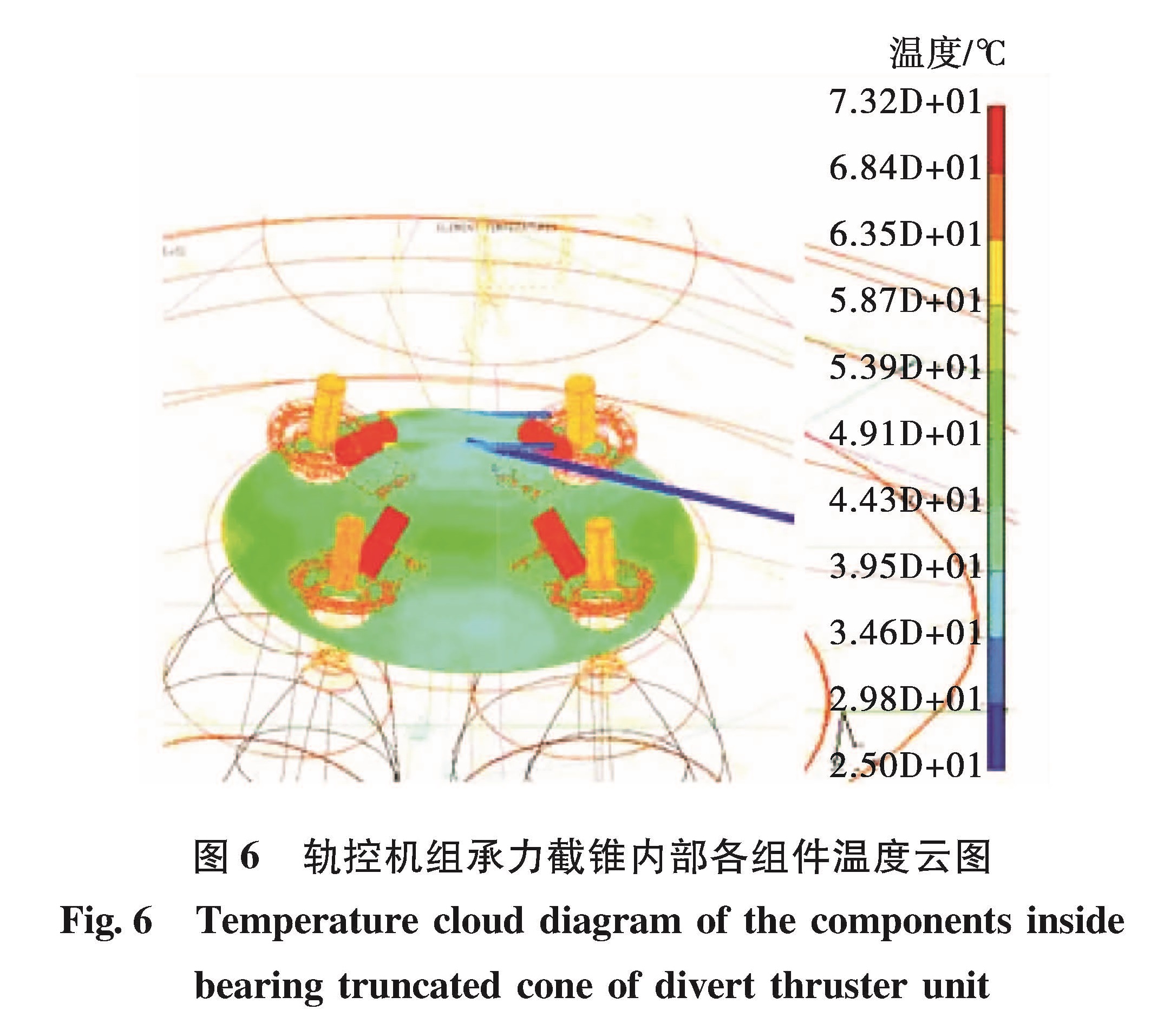
由于轨控机组位于整舱的尾部,发动机的身部大部分都暴露在外,因此当飞船尾对日连续偏航65°的飞行姿态下,轨控机组温度水平比较高。根据热量平衡原则,最终所有组件在计算完成后得出一个稳态温度值。由图5可得,发动机喷管尾部为56.7 ℃,该部分由于与深冷空间直接辐射换热并且由于与高温隔热屏和舱壁的辐射角系数较小,因此温度水平最低,最高温度出现在高温隔热屏中央未被发动机身部遮挡的区域,达到149 ℃,高温隔热屏和舱壁锥形多层组件由于本身位置和外形与接受太阳光热流入射程度不同,温度为52.5~149 ℃。由图6可得,氧路电磁阀最高温度为65.8 ℃,燃路电磁阀最高温度为73.2 ℃。氧路管路温度为28.1~62.4 ℃,燃管温度为28.4~69.3 ℃。
图5 轨控机组尾部温度云图
Fig.5 Temperature cloud diagram of divert thruster unit
图6 轨控机组承力截锥内部各组件温度云图
Fig.6 Temperature cloud diagram of the components inside bearing truncated cone of divert thruster unit
根据NASA的军标MIL-STD-1540,在高温端增加11 ℃的热不确定余量[10],得到轨控发动机电磁阀在载人飞船连续偏航飞行姿态下电磁阀和管路预示最高温度分别为84.2 ℃和80.3 ℃,温度不满足使用要求,为保证其正常工作,需更改热控措施降低其温度。
4.5 更改热控状态
由于原有的轨控机组热控状态无法满足其温度要求,因此需对其进行热控方案的更改。更改方案从两个方面考虑:①改变热控组件表面辐射特性。由于采用不同太阳吸收率和发射率的材料,可决定暴露于空间环境中表面热平衡温度[11],从而达到降低各组件温度的目的; ②改变热控多层厚度。热控多层主要是绝热作用[12],通过减少其厚度,加强组件与外部低温环境(指主承力壁面)之间的换热,达到降低组件温度的目的。
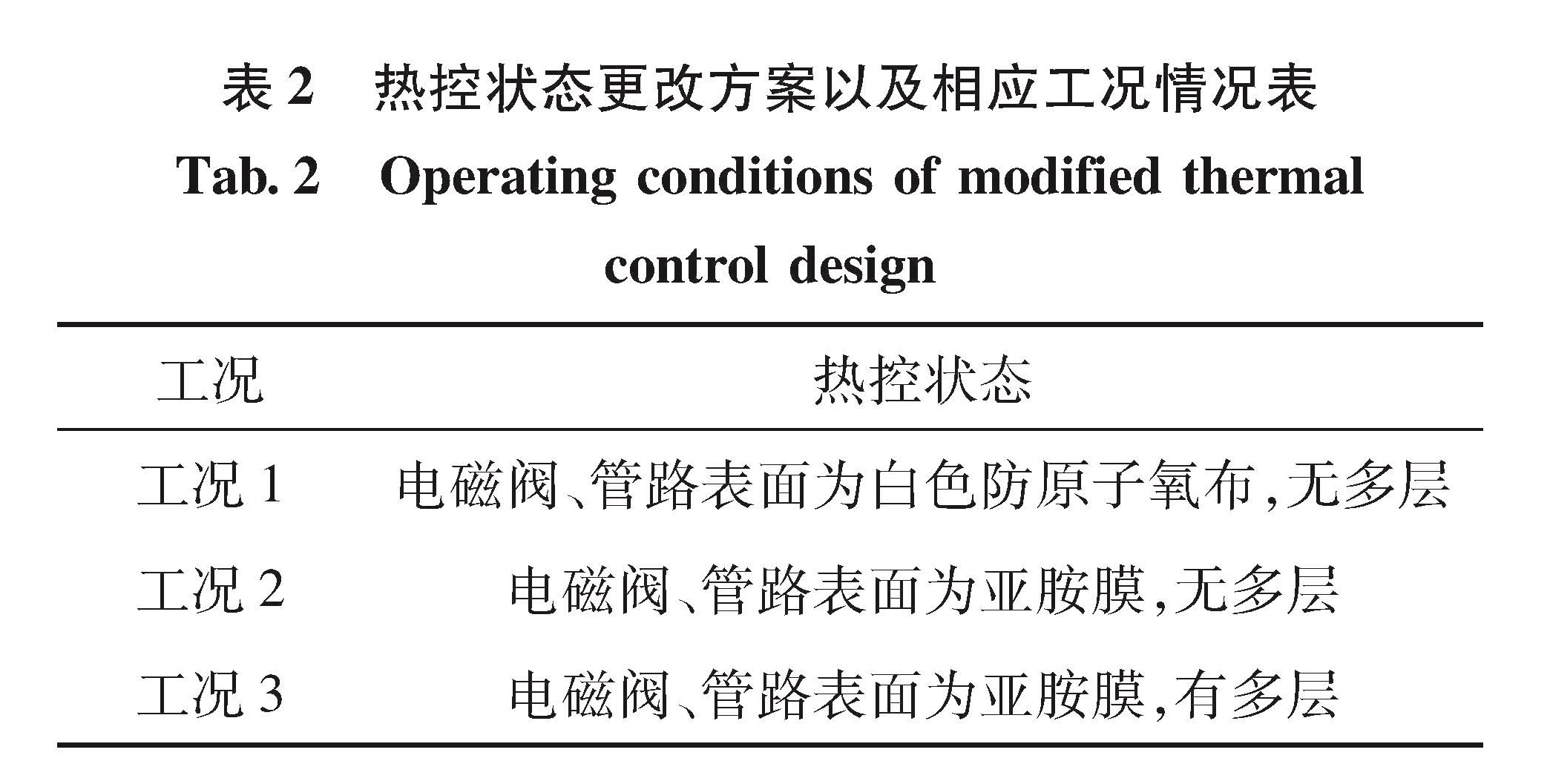
根据相应的边界条件以及飞行姿态(推进舱尾对日连续偏航姿态),制定其多种热控方案,见表2,各工况的热分析温度结果见表3。
表2 热控状态更改方案以及相应工况情况表
Tab.2 Operating conditions of modified thermal control design
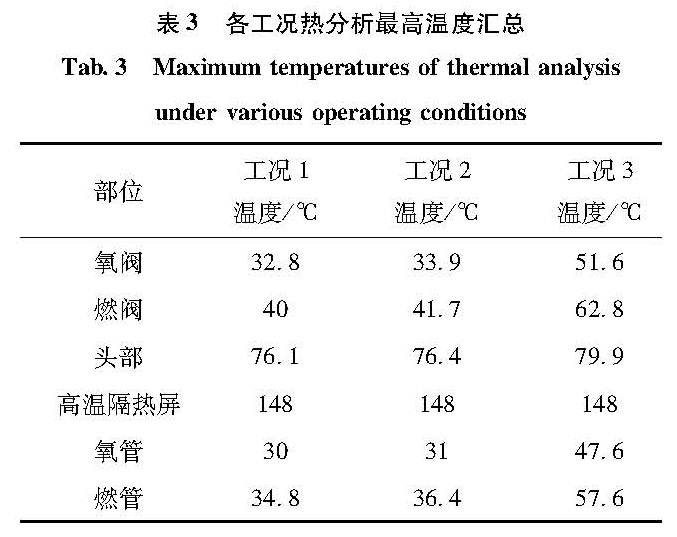
表3 各工况热分析最高温度汇总
Tab.3 Maximum temperatures of thermal analysis under various operating conditions
更改热控措施经过多轮仿真计算,从表3可以得出,工况1~工况3下,电磁阀和管路的表面温度均满足热控目标,此时需要选定最优的热控状态,以最少的代价取得较好的温控效果,这里工况3对应有多层隔热材料的热控状态要比工况1和2无多层隔热材料状态温度高出约20 ℃,因此去除多层隔热材料对高温工况来说是可取的。多层隔热材料的表面状态的选取可依据工况1和工况2,可以得出两种热控状态下温度基本一致,但白色防原子氧布由于表面发射率要比聚酰亚胺薄膜高出19%,采用白色防原子氧布带来的问题是低温工况下(即无外热流)向低温环境散热量较高,加热功率高,因此选用工况2对应的电磁阀和管路表面无多层隔热材料,表面为亚胺面状态。因此,轨控机组的热控技术状态进行如下更改:电磁阀和管路的热控表面状态由多层外表面为镀铝面更改为:多层取消,外表面为亚胺面。
对工况2进行热分析。从表3可得,氧阀最高温度33.9 ℃,燃阀最高温度41.7 ℃,头部最高温度76.4 ℃,高温隔热屏(包括锥形舱壁多层)最高温度148 ℃,氧管最高温度31 ℃,燃管最高温度36.4 ℃。管路和电磁阀的预示最高温度分别47.4 ℃和52.7 ℃,各组件特别是阀门均符合温控指标要求。
4.6 低温工况热分析
对高温工况下轨控机组热控状态进行了更改,还需对低温工况(这里考虑为完全无外热流的情况)进行热分析。
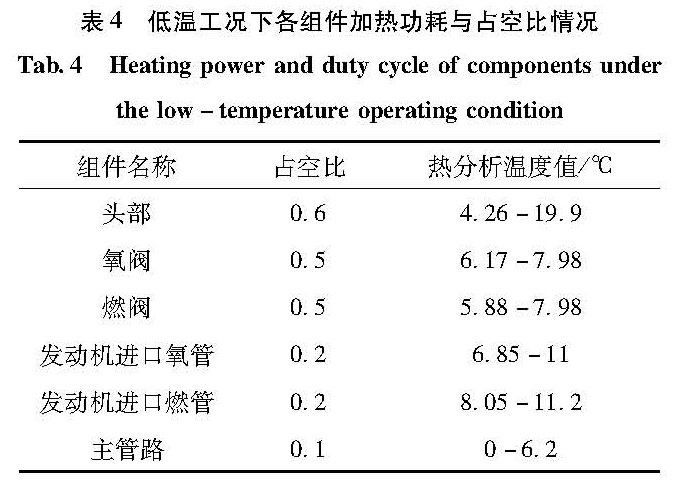
对轨控机组的热控状态进行更改后,高温工况下确实起到了降低各组件温度的目的,但是在低温工况下,即头对日连续偏航飞行姿态下,电磁阀和管路表面材料的发射率有明显的提升,隔热效果下降,更改后的亚胺面发射率是原来镀铝面的 12.4倍,散发的热量有所增加导致加热功率随之增加,具体体现在控温回路的占空比[13](反映加热回路开启频率参数)增加,需要考核原有设计功率是否满足温控要求,同时需要对占空比进行量化分析。表4为工况2下低温工况加热功率、占空比以及对应的热分析情况。
从表4可得,与外界低温宇宙环境路径最近的头部加热功耗在原有设计状态下需要占空比最多,平均加热功耗也最多,离宇宙环境越远其功耗占空比越小,在此占空比下各组件可均符合控温要求,说明总设计功率可以保证各组件的温度,因此选工况2对应的热控状态作为轨控机组热控状态,热控状态更改后在低温工况下加热功耗满足控温指标要求。
表4 低温工况下各组件加热功耗与占空比情况
Tab.4 Heating power and duty cycle of components under the low-temperature operating condition