3.1 永磁构型选择
稳定超导磁悬浮的实现要求永磁结构应满足的条件为:所提供的外磁场相对于超导块材的轴向是对称的。这样可以最大程度地保证侧向力的平衡。满足这个条件的永磁构型主要有3种,如图4所示。
图4 3种相对于超导体轴向对称的永磁结构示意图
Fig.4 Three permanent magnetic structures relative to HTS axial symmetry
1)构型Ⅰ(轴向顺排型):磁结构所采用的一对永磁体均为轴向磁化,指向超导体的端面,与其轴向平行。
2)构型Ⅱ(径向聚磁型):磁结构所采用的一对永磁体磁化方向相对,沿径向方向。
3)构型Ⅲ(Halbach型):磁结构所采用的一对径向磁化的永磁体之间有一个磁化方向指向超导体端面的永磁体。
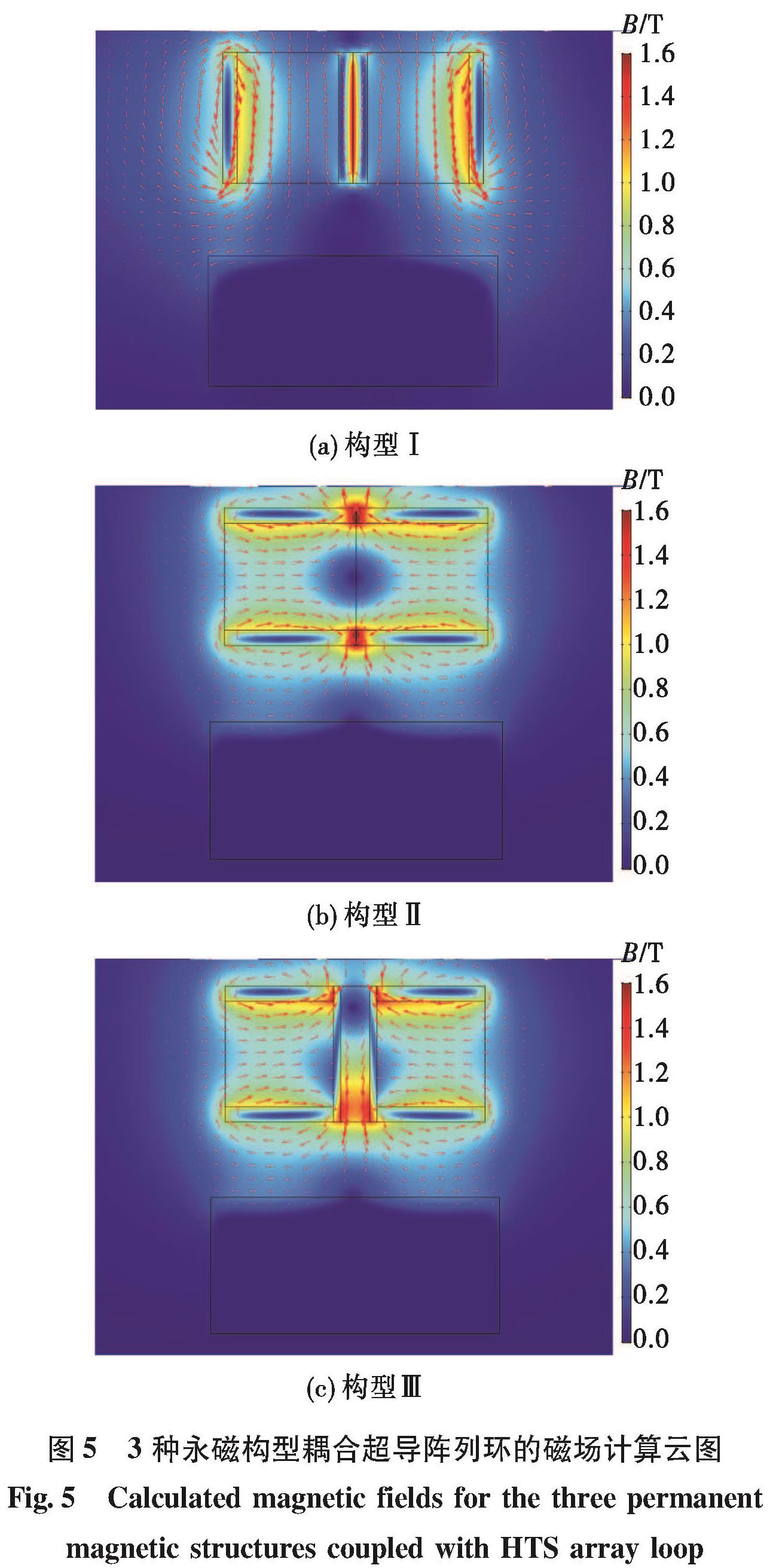
图5分别给出了上述3种永磁构型耦合超导阵列环的磁场计算云图。在构型Ⅰ中,超导阵列环仅有边缘上部少量的区域有磁场穿透,其余区域均因Meissner效应而没有磁场穿透。此外,超导阵列环与永磁结构之间也存在大片零磁场区域。由于聚磁结构的磁场较强,在构型Ⅱ和构型Ⅲ中,超导阵列环的磁场穿透的区域增加并向中心靠拢,其与永磁结构之间零磁场区域也进一步缩小。从图5可看出,构型Ⅱ与构型Ⅲ的区别在于:构型Ⅱ上部磁场强度略高于下部,而构型Ⅲ磁场主要集中在下部。构型Ⅲ中超导阵列环的磁场和电流密度分布如图6所示。由图6可见,电流分布区域与磁场分布区域较为一致,这也是超导体Meissner效应的重要体现。
图5 3种永磁构型耦合超导阵列环的磁场计算云图
Fig.5 Calculated magnetic fields for the three permanent magnetic structures coupled with HTS array loop
图6 构型Ⅲ Halbach永磁构型中超导阵列环内部的磁场密度和电流密度分布图
Fig.6 Magnetic density distribution and electric current density distribution of the HTS array loop for Type-III Halbach permanent magnetic configuration
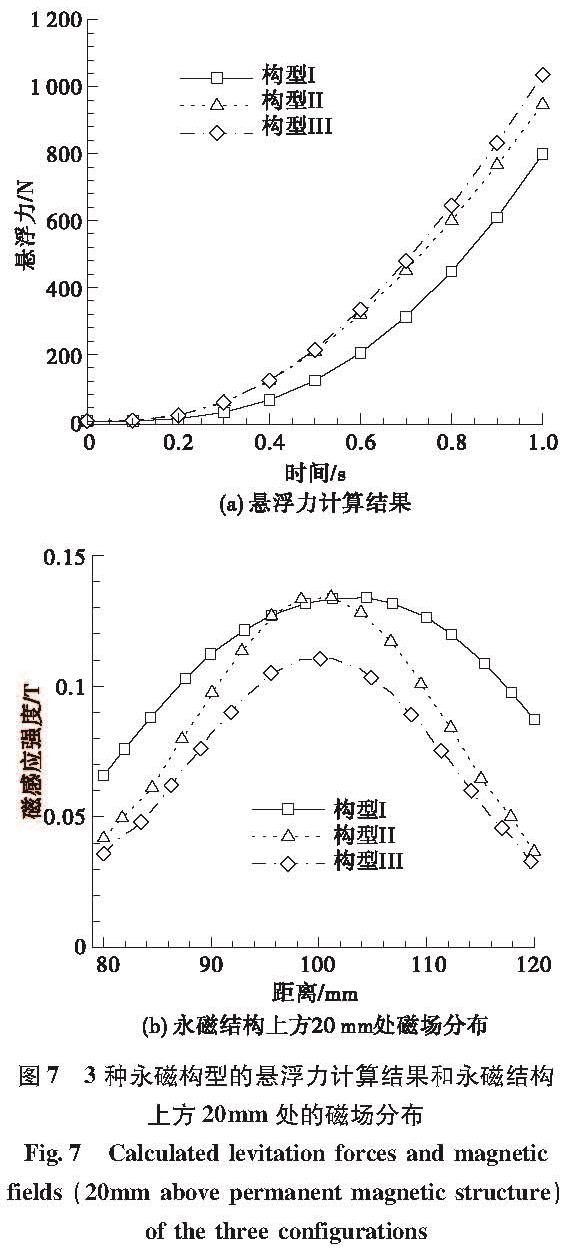
采用时间非定常计算,通过调整面电流大小使永磁结构的磁场在1 s内从零增加到设计值,并根据式(3)计算悬浮力,结果如图7(a)所示。由图可见,构型Ⅲ的悬浮力始终最大,构型Ⅱ次之,而构型Ⅰ最小。由于构型Ⅰ没有采用聚磁结构,其磁场是最小的。虽然式(2)给出YBCO材料的电流密度随外磁场的增强而减小,但是构型Ⅰ中超导阵列环的电流区域过小,导致其产生的悬浮力也是最小的。相应地虽然构型Ⅲ的最大电流密度1.30×108 A/m2要小于构型Ⅱ的1.32×108 A/m2和构型Ⅰ的1.39×108 A/m2,但是其电流区域最大,故所产生的悬浮力是最大的。
图7(b)给出了计算结束时刻(1.00 s)时,永磁结构正上方20 mm区域(r: 80~120 mm)的磁场分布。构型Ⅰ磁场是最高的,构型Ⅱ次之,构型Ⅲ最小。虽然构型Ⅰ的磁场较弱,但其为一发散场,磁场强度随距离的增加衰减得较慢。构型Ⅱ和构型Ⅲ均为聚磁结构,随着距离的增加,二者磁力线方向较为迅速地转向水平,流向另外一极。二者不同之处在于:由于Meissner效应,构型Ⅱ永磁结构的磁力线更多地向上部汇集,其上部磁场较高; 由于Halbach构型的采用,构型Ⅲ永磁结构的磁力线更多从下部流向另外一极,其上部磁场较小。由于转子的背面为卫星的敏感元件区域,需防止过大的磁场干扰仪器设备。综合分析,构型Ⅲ永磁构型在悬浮力和削弱背面磁场方面均有一定的优势,所以转子的永磁结构建议采用Halbach构型。
图7 3种永磁构型的悬浮力计算结果和永磁结构上方20mm处的磁场分布
Fig.7 Calculated levitation forces and magnetic fields(20mm above permanent magnetic structure) of the three configurations
3.2 Halbach构型永磁结构优化
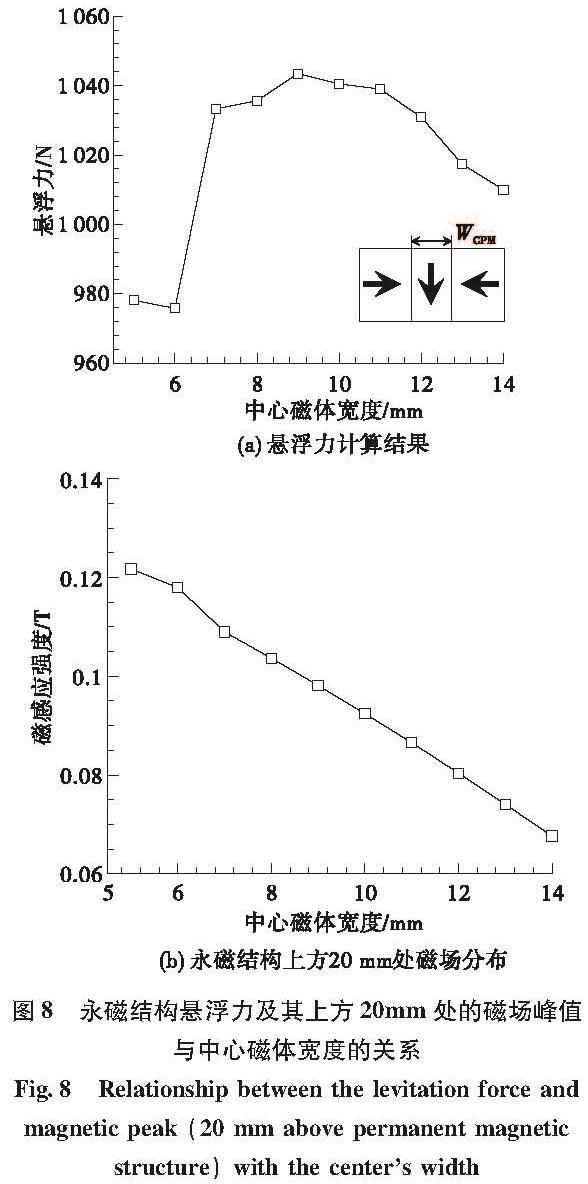
为获得更大的悬浮力以增强承载能力和飞轮的稳定性,本文对构型Ⅲ Halbach构型的永磁结构进行了优化设计。优化的结构参数包括:中心磁体宽度WCPM和中心磁体高度HCPM,如图8(a)和图9(a)中的内嵌图所示。优化的步骤为:保持永磁结构总体尺寸不变,改变WCPM进行计算,以悬浮力最大为目标,参考永磁结构上方磁场计算结果,得到最优的中心磁体宽度; 将WCPM固定在所得最优宽度上,改变HCPM进行计算,兼顾磁场计算结果,得到最优的中心磁体高度。
图8给出了永磁结构悬浮力及其上方20 mm处的磁场峰值与中心磁体宽度的关系。
图8 永磁结构悬浮力及其上方20mm处的磁场峰值与中心磁体宽度的关系
Fig.8 Relationship between the levitation force and magnetic peak(20 mm above permanent magnetic structure)with the center's width
在WCPM为5~14 mm的优化范围内,悬浮力在9 mm处存在一个最优点,达到了1 043.5 N,而磁场强度则随着WCPM的增加而减小,从5 mm时的0.12 T降低至14 mm时的0.67 T。虽然WCPM取9 mm时悬浮力计算值最大,但本文决定采用10 mm作为最优的中心磁体宽度。这是因为:当WCPM在9~8 mm范围时,悬浮力由1 043.5 N降低至1 035.7 N; 当WCPM在9~11 mm范围时,悬浮力的范围则是从1 043.5 N变化到1 039.0 N。可见,把最优宽度定为10 mm可以避开实际操作中尺寸微小差异引起的悬浮力较大变化。
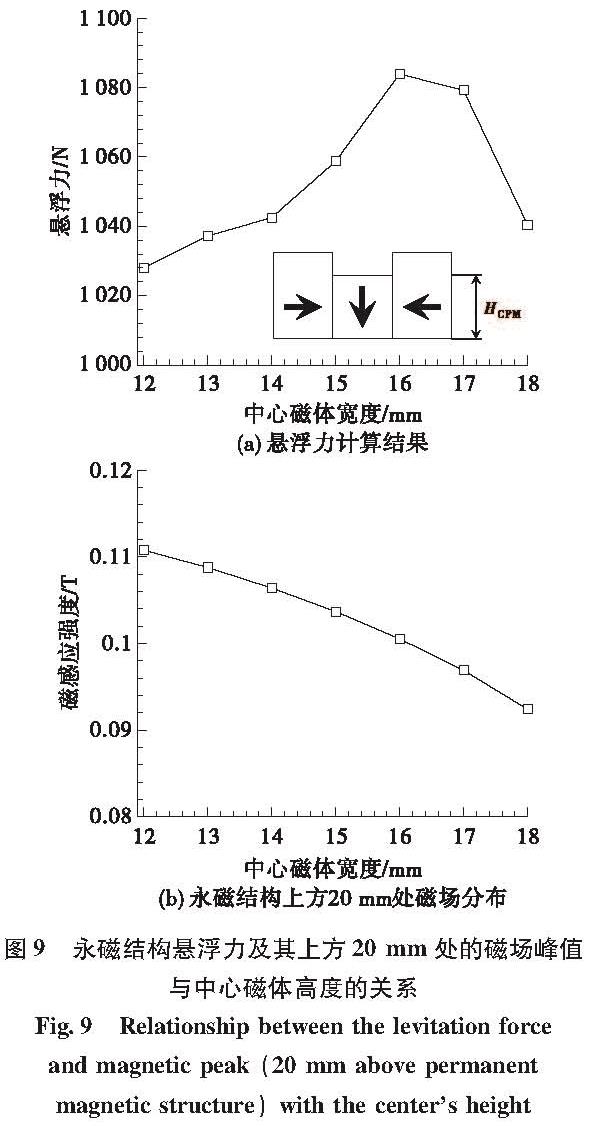
图9(a)和图9(b)则给出了永磁结构悬浮力及其上方20 mm处的磁场峰值与中心磁体高度的关系。当HCPM为16 mm时,悬浮力达到最大值1 083.9 N; 永磁结构上方磁场随着磁体高度的增加而增强。采用不等高的中心磁体可使永磁下部的磁场进一步汇聚,进而产生更强的悬浮力,但由于破坏了上部磁路,使上方磁场更呈现一个发散场的特性。通过优化计算,在给定永磁结构区域尺寸和超导区域尺寸下,得到了Halbach构型永磁结构的最优WCPM=10 mm和HCPM=16 mm。
图9 永磁结构悬浮力及其上方20 mm处的磁场峰值与中心磁体高度的关系
Fig.9 Relationship between the levitation force and magnetic peak(20 mm above permanent magnetic structure)with the center's height