收稿日期:2018-11-29
基金项目:国家自然科学青年基金(11802015)
作者简介:周昊澄(1989—),男,博士,研究领域为航天器总体设计
基金项目:国家自然科学青年基金(11802015)
作者简介:周昊澄(1989—),男,博士,研究领域为航天器总体设计
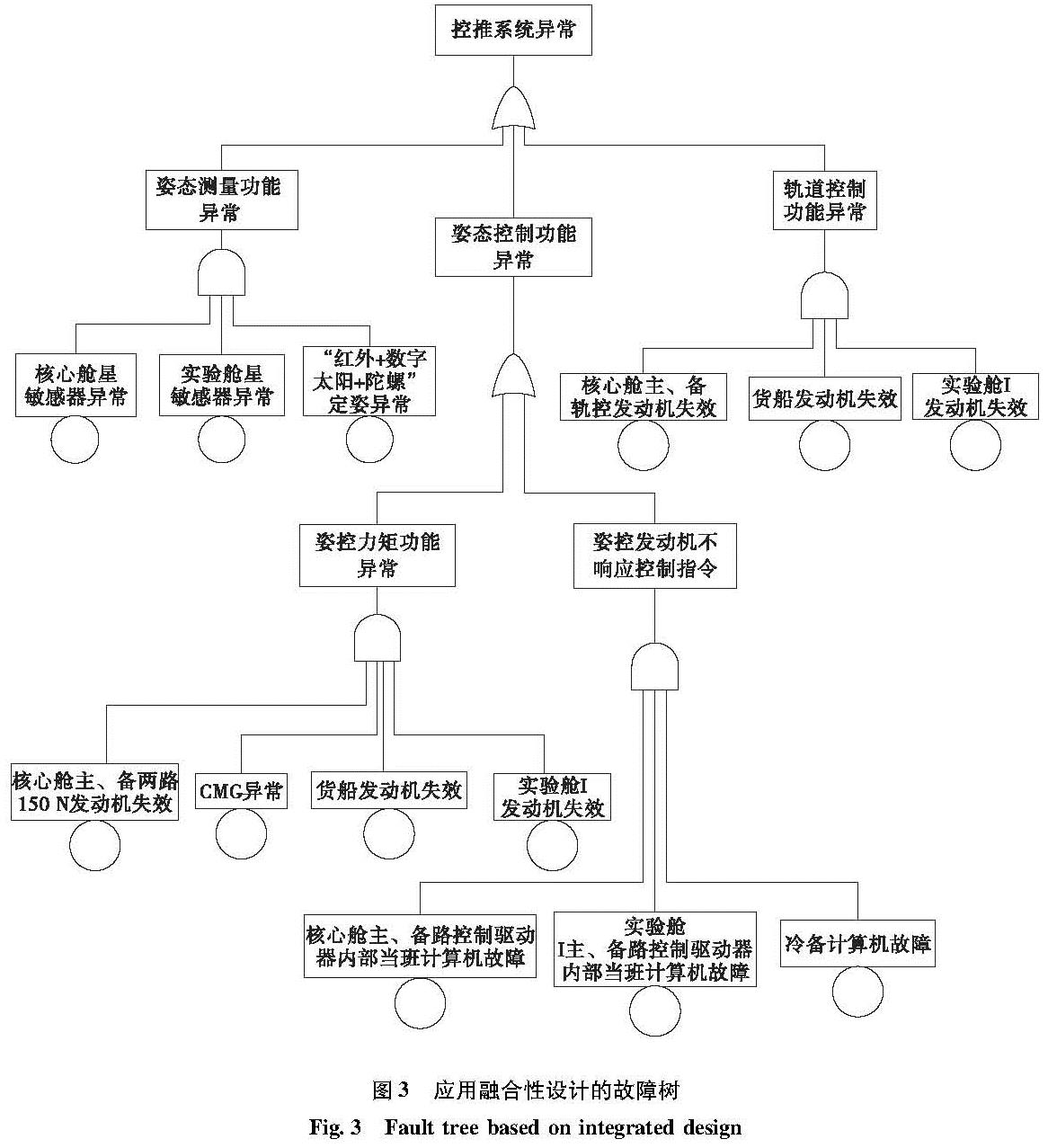
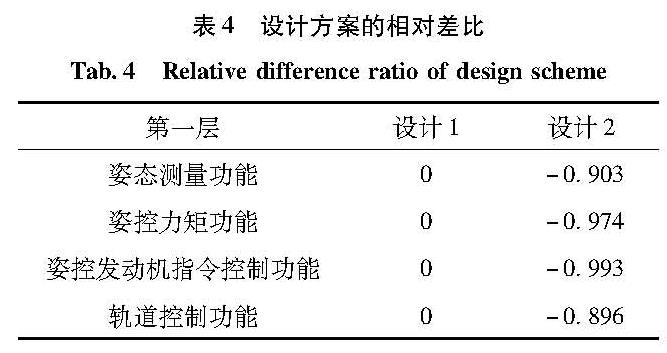
针对组合体航天器高可靠性、小子样的特性,以组合体航天器控推系统为例对多舱融合性设计方案建立了基于PRA(Probabilistic Risk Assessment,概率风险评估)的风险评估模型。通过对比使用融合性设计和未使用融合性设计两种方案的故障树和相对比差,以验证融合性设计对系统可靠性的贡献为目标,从定性和定量的角度验证了融合性设计可以大幅降低组合体航天器控推系统重大风险的发生概率。通过分析重大风险的重要度权重,得到了组合体航天器控推系统重大风险的重要度排序,从风险的角度为决策者提供了应用融合性设计的建议。
For the characteristics of high reliability and small sample of combined spacecraft, this paper takes the control and propulsion system of combined spacecraft as an example to establish a PRA-based risk assessment model for multi-cabin integrated design scheme. By comparing the fault tree and the relative difference between the two schemes using and not using integrated design, in order to verify the contribution of integrated design to the reliability of the system, it is verified qualitatively and quantitatively that integrated design can significantly reduce the probability of major risks of the combined spacecraft thrust control system. By analyzing the importance weight of the major risk, the importance ranking of the major risk of the combined spacecraft thrust control system is obtained. From the risk point of view, some suggestions for decision makers to apply the integrated design are also provided.