3.1 高速动平衡效率优化
转子升速过程中,若振动过大,且判别为转速一倍频振动(1f)占优,需进行转子动平衡。通过影响系数法开展转子平衡。
3.1.1 影响系数平衡法
利用影响系数法,两平面平衡需运行转子3次,才能完成1次平衡过程[13-14]。
初次运行:使转子以转速Ω运行,在测点1和测点2处测得转子振动分别为A10和A20。
第2次运行:在第1校正面上加试重uT1,使转子仍以转速Ω运行,在测点1和测点2处测得转子振动分别为A11和A21,它们既包含了原始不平衡的影响,也包含了试重uT1的影响。试重的影响为
ΔA11=A11-A10,ΔA21=A21-A20
故影响系数为
a11=(A11-A10)/(uT1),a21=(A21-A20)/(uT1)
第3次运行:去掉第1校正面上的试重uT1,在第2校正面上加试重uT2,再次使转子仍以转速Ω运行,测得转子振动分别为A12和A22,它们包含了原始不平衡及试重uT2的影响。试重uT2的影响系数为
a12=(A12-A10)/(uT2),a22=(A22-A20)/(uT2)
求得影响系数后,就可由平衡条件
[A10
A20]+[a11 a12
a21 a22][u10
u20]=0
求得平衡校正量u10和u20为
[u10
u20]=-[α11 α12
α21 α22]-1[A10
A20]
由于涡轮泵转子系统在运行转速范围内属于刚性转子,仅需2个平衡校正面即可实现转子的平衡。转子系统预设平衡面为涡轮盘和离心轮,涡轮叶片围带及离心轮前突肩径向均布有平衡螺钉孔,通过加重方式进行转子平衡。
3.1.2 平衡效率优化
影响系数平衡法是建立在“转子1f响应与不平衡间线性关系”的基础上。滚动轴承-转子系统高速运行过程中,不可避免地存在一定的非线性(如轴承滚动体间的接触状态、润滑油黏性迟滞效应、轴承外环间隙、转子各装配零件间的内摩擦等引起的非线性),大多数情况下,在进行转子动特性分析时,与质量不平衡相比这些非线性因素的影响可忽略不计。但高速旋转时,这些非线性因素对转子平衡过程有着较大影响,因此必须加以考虑。
在转子高速动平衡过程中,平衡试重的选择对平衡精度有重要的影响。高速下若平衡试重过大,加试重后转子振动过大,不能升至平衡目标转速,无法实施动平衡; 若平衡试重量过小,加试重前后转子的1f响应变化不明显,上述非线性因素将对加试重前后转子振动的变化量产生明显的影响,由3.1.1节可知,此时获得的影响系数误差较大,转子的平衡精度将严重降低。
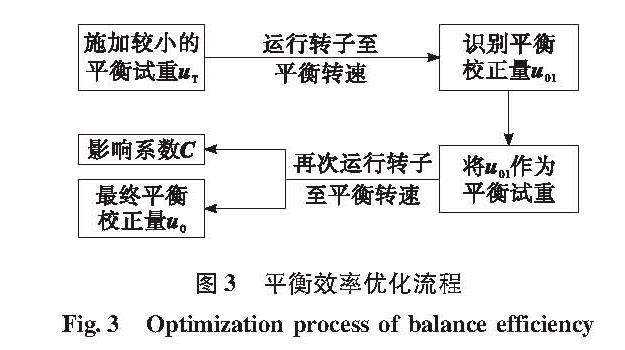
在涡轮泵转子实际平衡操作中,为兼顾平衡精度和平衡效率,采取如下操作对平衡效率进行优化(图3)。施加较小的平衡试重uT(一般小于1 g),识别出相应的平衡校正量u01。然后将识别出的平衡校正量作为平衡试重,再次运行转子重新计算影响系数C,进行平衡校正量识别,第二次识别的校正量为最终的平衡校正量u0。
图3 平衡效率优化流程
Fig.3 Optimization process of balance efficiency
图4为平衡效率优化前后平衡效果的对比结果。初次升速该涡轮泵转子至7 000 r/min,涡轮端及离心轮端振动量级快速增大,需进行转子的动平衡。采用影响系数法平衡时,考虑到若加试重过大,可能存在振动增大后转子无法升速至目标转速7 000 r/min的可能,因此分别在涡轮、离心轮处加较小的试重量,采取传统方法动平衡后转子振动位移有所减小,但减小幅度有限,并没有达到预期的平衡效果。改用
图3所示的优化方法进行转子平衡,平衡效果明显,转子可稳定升速至11 800 r/min。
图4 平衡效率优化前后平衡效果对比曲线
Fig.4 Comparison curves of balance effect before and after optimization of balance efficiency
7000 r/min时,采用传统平衡方法平衡后,各测点振动幅值减小率最大不超过30%,而平衡效率优化后,一次平衡振动位移幅值减小率均大于73.7%,平衡效率明显提高。
3.2 支承状态优化
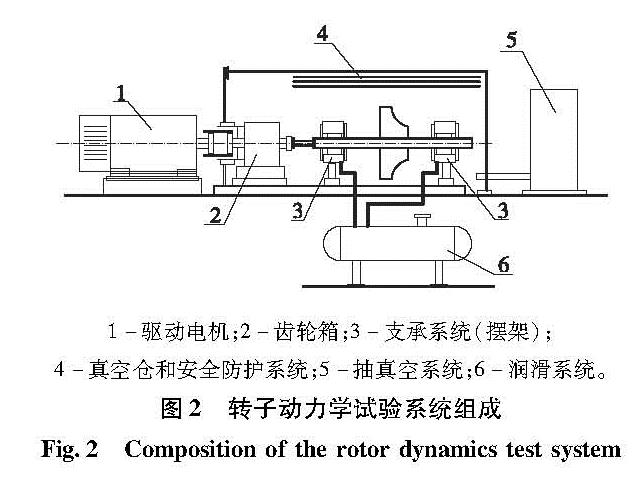
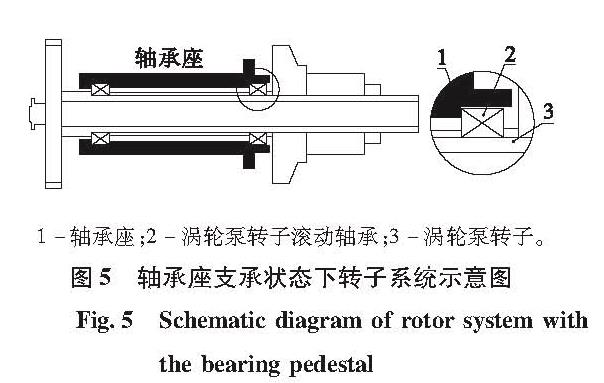
在初期试验方案中,涡轮泵转子通过轴承座支承于试验台刚性支承(摆架)上,如图5所示。两轴承外环与轴承座径向为间隙配合。试验中分别在轴向、涡轮两正交方向及离心轮两正交测量转子的振动位移。
1-轴承座; 2-涡轮泵转子滚动轴承; 3-涡轮泵转子。
图5 轴承座支承状态下转子系统示意图
Fig.5 Schematic diagram of rotor system with the bearing pedestal
该支承状态下,在涡轮及离心轮处经过多轮次加重平衡后,转子最高升速至12 500 r/min,振动位移主要表现为1f分量,如
图6所示。可看出,0~7 000 r/min转速范围内转子的平衡减振效果明显。9 000 r/min附近,离心轮处振动位移突增,9 000~11 000 r/min时振动位移较大但幅值基本保持稳定,转速高于12 000 r/min后,涡轮及离心轮处振动均急剧增大。后续经过多次运行和平衡,9 000 r/min以上均不能有效平衡减振,在12 500 r/min附近无法继续升速。
图6 轴承座支承状态下转子1f振动位移变化曲线
Fig.6 Displacement curve of rotor 1f vibration
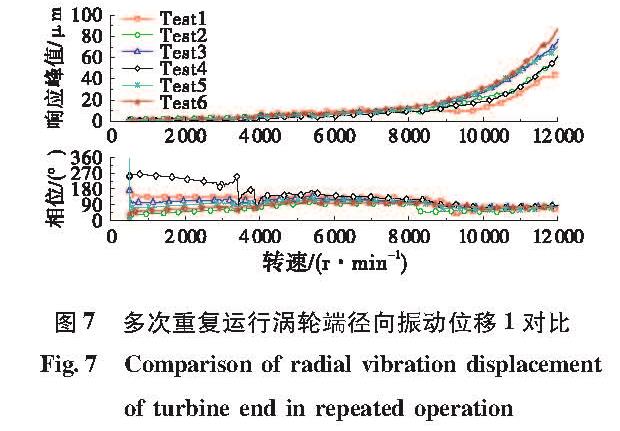
在保持转子结构状态及平衡状态不变的情况下,多次运行对振动位移的重复性进行对比。结果分别如
图7和
图8所示。
图7 多次重复运行涡轮端径向振动位移1对比
Fig.7 Comparison of radial vibration displacement of turbine end in repeated operation
图8 多次重复运行离心轮端径向振动位移1对比
Fig.8 Comparison of radial vibration displacement of pump end in repeated operation
图7和
图8的振动位移曲线对比分析表明:0~8 000 r/min转速范围内,不同次重复运行转子的径向振动位移差异较小; 8 000~9 000 r/min范围内,不同次重复运行,涡轮端振动位移差异逐渐增大,但仍在可接受范围内,而离心轮处的振动差异已经较为明显; 9 000 r/min以后,随着转速升高,转子振动位移的差异越来越大,尤其是离心轮处,12 000 r/min时,不同次运行振动位移幅值差异甚至超过了100%,表明高速下转子的振动具有很强的随机因素影响,转子振动表现出很强的非线性特性。对于以线性系统为基础的影响系数法在此的应用自然会受到限制,平衡效率很低甚至出现平衡后某些振动增大的现象。
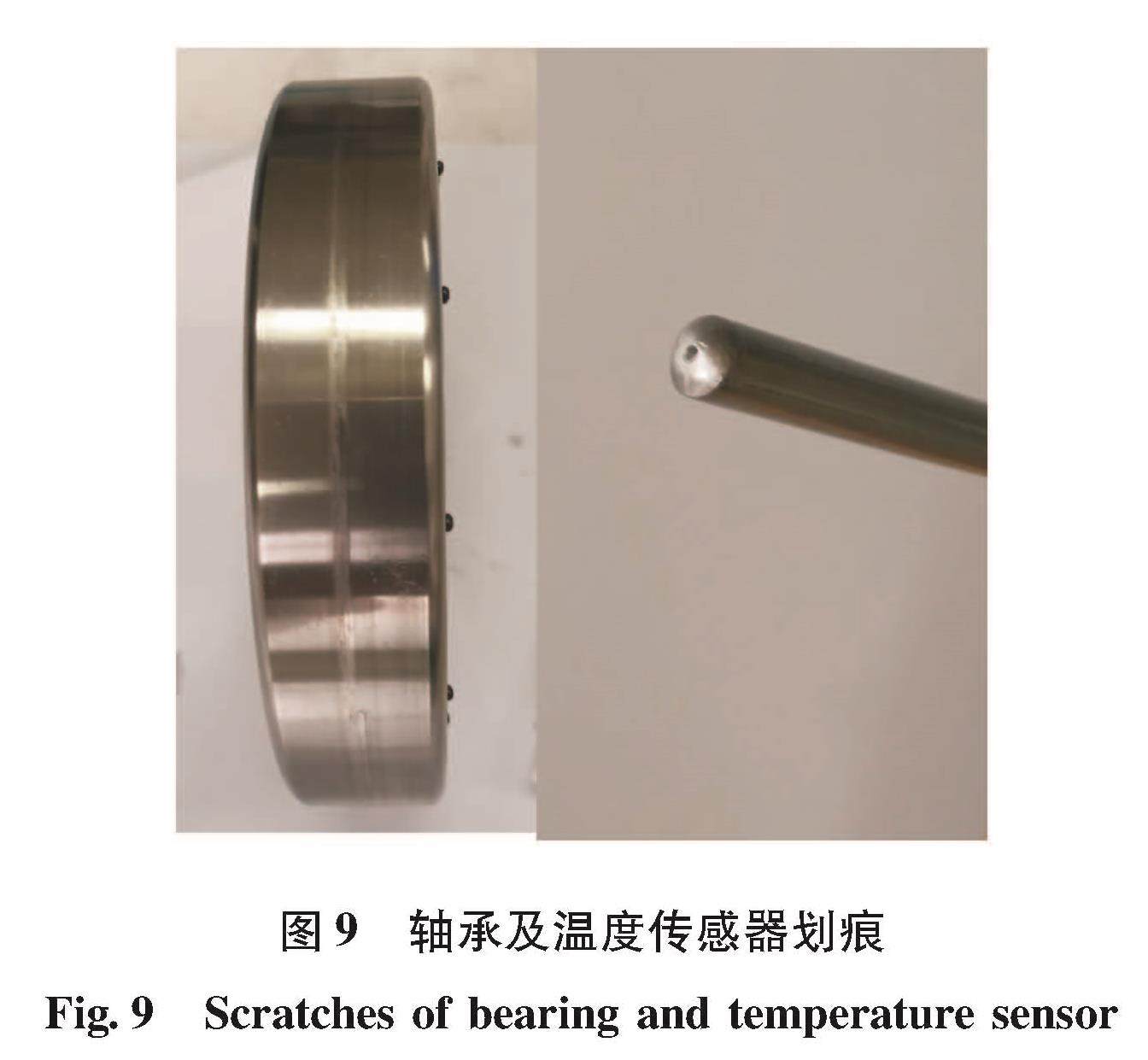
振动位移的频谱分析结果表明,在该支承状态下,转子振动位移的各阶倍频(1f~4f)均被激发出来。试后分解检查,发现离心轮端深沟球轴承外环有一整圈划痕,对应的测温传感器端部也有明显磨损痕迹,如图9所示。表明转子运行过程中该轴承外圈在爬动,轴承外圈安装间隙过大。结合以上现象,从故障诊断的角度分析,可知该状态下转子存在基础松动的典型故障[15-18]。
图9 轴承及温度传感器划痕
Fig.9 Scratches of bearing and temperature sensor
为消除该故障,将整体式筒状结构的轴承座修改为两轴承分别独立的过渡环支承,过渡环与轴承外环小过盈配合,如
图 10所示。重新运行转子,最高升速至15 000 r/min,转子振动的重复性明显好转,完全消除了支承松动的影响。
1-轴承过渡环; 2-涡轮泵转子滚动轴承; 3-涡轮泵转子。
图 10 支承状态优化结果示意图
Fig.10 Schematic diagram of supporting state optimization results
3.3 轴向力加载状态优化
涡轮泵转子的角接触球轴承在工作过程中需承受一定的轴向力,否则该轴承的工作状态不稳定会诱发转子的非线性振动,造成高速下转子的平衡效率和平衡精度下降,影响转子进一步升速。在转子平衡效率及支承状态优化的基础上,轴向力最初通过两刚性支承(摆架)底部中心单点施加,当轴向力为100 kg时,经过平衡转子可升速至19 700 r/min。该状态下,0~19 500 r/min时转子的振动位移均在正常范围内变化,但转速高于19 500 r/min时,涡轮端振动位移急剧增大,多轮平衡后均无法有效进行减振,不能继续升速。将轴向力增大至160 kg,重新进行转子平衡,可升速至22 000 r/min。继续增大轴向力,转子的运行状态并无明显改善。
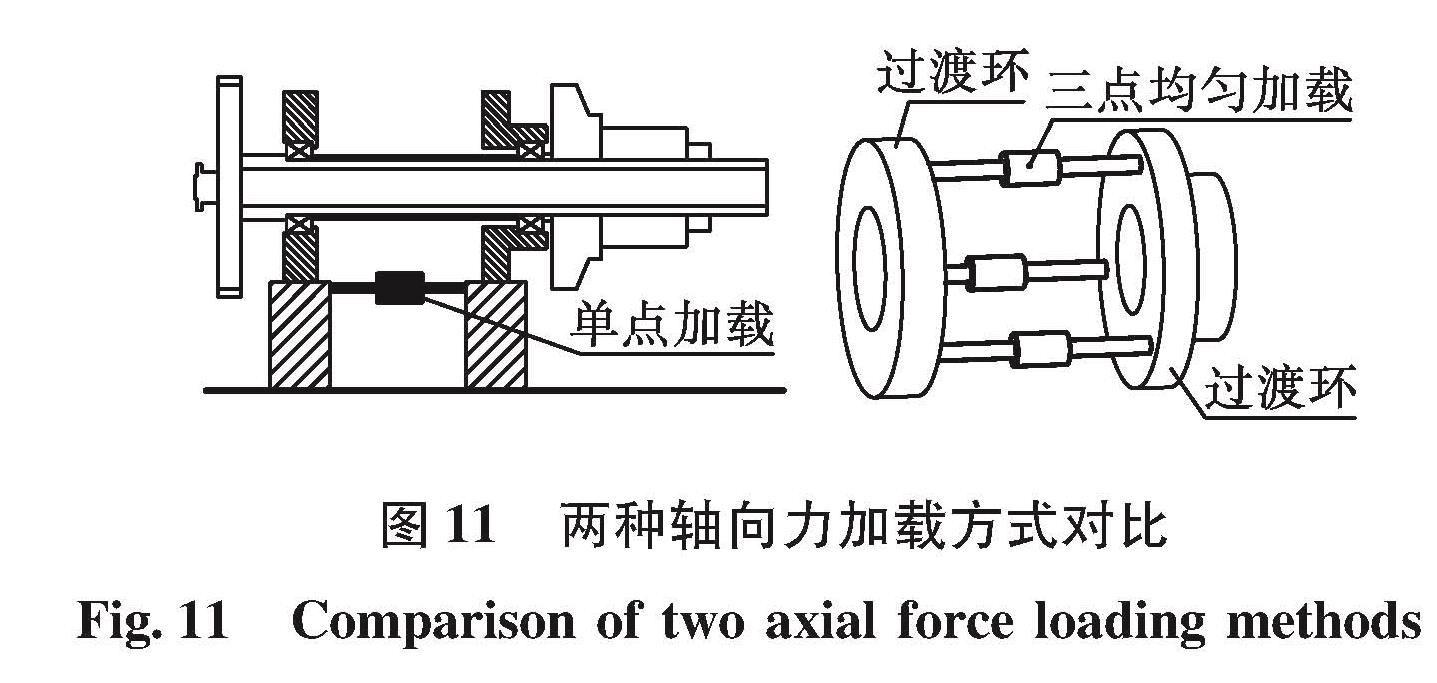
将轴向力加载方式由刚性支承底部中心单点加载修改为刚性支承内孔三点均匀加载,两种轴向力加载方式对比示意图如图 11所示。三点加载可确保两支承(摆架)轴向受载后与试验台基础的垂直度及两摆架之间的相互平行度,优化了两轴承的工作状态。每一点的轴向力通过力传感器两端的螺钉顶载实现,轴向力大小可通过螺钉的旋进量进行控制,通过力传感器进行精确测量。
图 11 两种轴向力加载方式对比
Fig.11 Comparison of two axial force loading methods
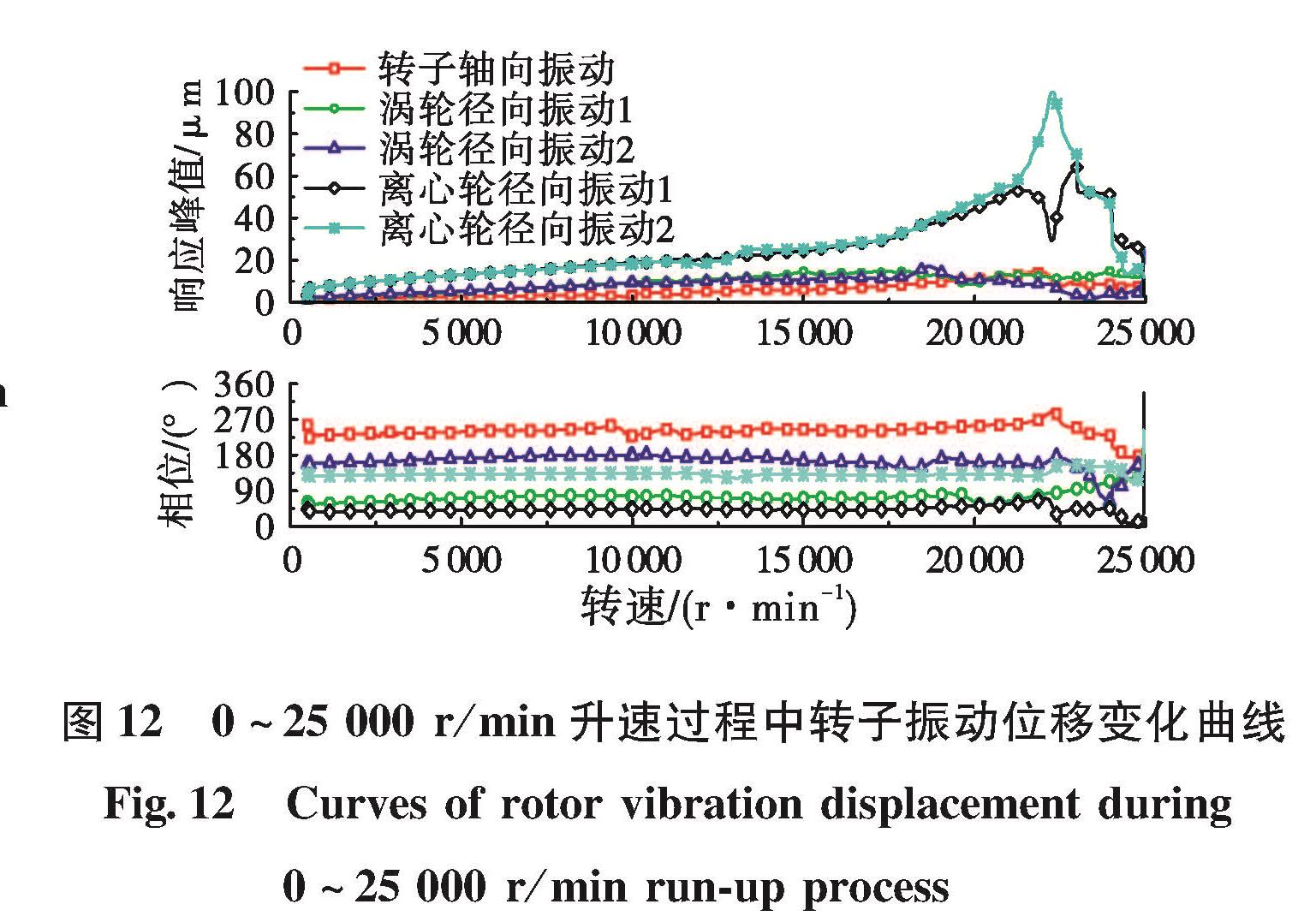
在三点均匀加载状态下,调整轴向力至合适的大小,通过动平衡,转子最高可升速至25 000 r/min,达到了试验目的。振动位移曲线如
图 12所示。
图 12 0~25 000 r/min升速过程中转子振动位移变化曲线
Fig.12 Curves of rotor vibration displacement during 0~25 000 r/min run-up process