2.1 CANopen协议在试车测控软件中的应用
2.1.1 运动控制子协议DSP402及其应用
伺服驱动器嵌入式软件中使用了标准伺服运动控制子协议DSP402[17-18],该协议是工作状态跳转的控制流程,其运动控制状态机如图2所示。
在发动机燃气分流阀早期研制阶段,使用综合测控系统进行分流阀开度调节时需要实时监测分流阀开度位置,分流阀开度位置到达开度限位时,需要立即控制伺服电机停止动作,避免损坏分流阀整体机械结构,综合测控软件使用DSP402运动控制子协议控制状态机进行设计,在驱动器监测到电流过流后,立即执行“错误”处理策略,驱动器立即中断电机控制使能信号,控制电机停止转动。
图2 DSP402控制状态机
Fig.2 The control state machine of DSP402
2.1.2 CANopen协议模型及其应用
CANopen设备包括通讯模型、对象字典、应用程序3部分[19-20],如图3所示。其中对象字典是设备与设备之间进行交互的接口,提供了完全访问应用程序的途径。通讯模型指CANopen网络中的通讯消息(报文)的内容和功能,主要分为:管理报文、特殊功能对象、服务数据对象SDO及过程数据对象PDO[21-23]。
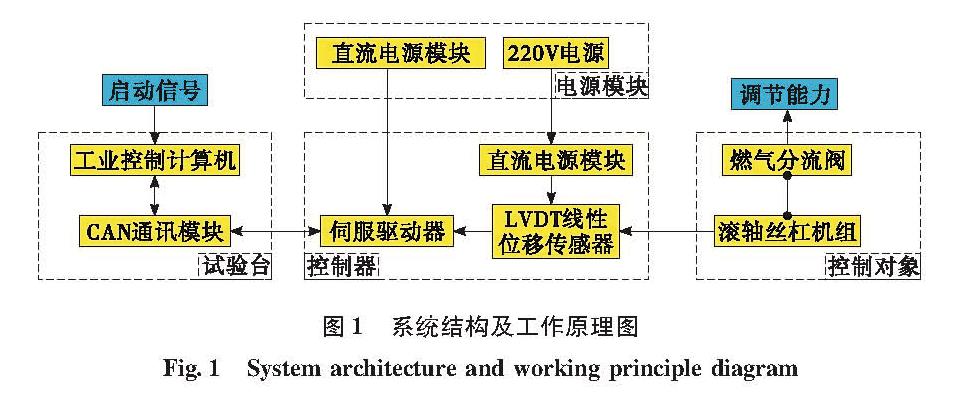
本文所述的试车综合测控系统的核心任务之一是通过长距离可靠数据通讯控制伺服电机按照既定的工况时序点序列(指令位置—时间)执行动作,从而达到调节控制燃气分流阀出口压力的目的。
在完成此任务时,需要保证控制指令响应延时小于10 ms,同时需要在试验过程中以20 ms周期上传电机实际位置、电机实际转速、电机母线电流及电压等过程数据,以实现对试车现场被控对象的监测及故障保护。为完成上述的过程数据的同步实时传输并保证控制指令实时响应,使用CANopen协议独特的数据字典及PDO/SDO数据通讯方式可以高效完成此项任务。
图3 CANopen设备组成
Fig.3 Equipment composition of CANopen
2.1.3 数据字典的应用
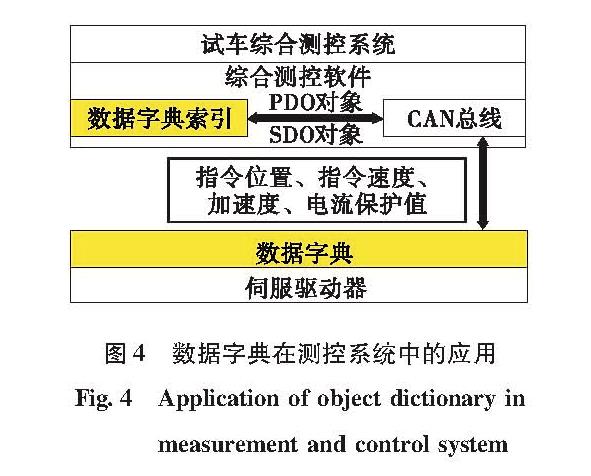
在进行力矩特性分析试验过程中,由于伺服电机带负载特性需要进行试验验证,因此综合测控软件需要根据试验时电机负载特性实时更改伺服驱动器的运动控制参数。CANopen协议的数据字典可以使用标准的伺服控制协议对伺服驱动器的运动参数进行在线下载/上传,实现试验过程中对伺服电机转速、加速度、母线电流保护等参数的在线更新,以满足研制阶段不断变化的负载特性对于运动控制参数的要求,其使用方式如图4所示。
图4 数据字典在测控系统中的应用
Fig.4 Application of object dictionary in measurement and control system
2.1.4 SDO和PDO对象的应用
服务数据对象SDO通过索引和子索引访问服务器对象字典,通讯采用请求/应答的方式,作为参数配置、信息查询的方式,具体实现方式如图5所示。
图5 SDO服务数据对象报文发送/接收
Fig.5 SDO service object message transmitting/receiving
过程数据对象PDO:通过索引和子索引传输实时数据,PDO映射可以实现指定数据字典数据项发送/接收,分为TPDO和RPDO,PDO数据对象的触发方式可分为同步触发和异步触发方式,PDO通道传输数据的内容和传输方式均需要通过SDO对象进行预配置[24-25],PDO通道配置方式如图6所示。
图6 PDO通道配置
Fig.6 PDO channel configuration
本文所述综合测控系统将试车台和现场的CAN总线通讯数据类型分为参数类型和过程类型,参数类型数据指不需要在试验过程中实时下载/上传的数据,例如伺服驱动器PID控制参数、电机极对数等参数; 过程类型数据指需要在试验过程中实时下载/上传的数据,例如电机实际位置、实际转速、母线电压和电流等。对于以上两种类型的数据,参数类型数据使用SDO服务数据对象进行数据封装和传输,过程类型数据使用PDO过程数据对象进行封装并完成周期同步传输,SDO和PDO在综合测控系统中使用方式如图7所示。其中:
步骤①是根据PDO通道携带的物理数据,使用SDO对象配置PDO通道的载体数据的索引值。
步骤②使用SDO对象使能PDO通道数据的传输。
步骤③表示TPDO和RPDO对象传输的测控系统物理数据。使用这种方式可以实现过程数据实时上传,并且数据的替换和后期维护方便,不需要更改数据通讯协议数据区的内容,只需要替换对象的索引,增强了测控系统软件的维护性。
图7 SDO和PDO在测控系统中的使用方式
Fig.7 SDO's and PDO's usage in the measurement and control system
2.2 基于CANopen协议的综合控制软件
2.2.1 综合控制软件架构
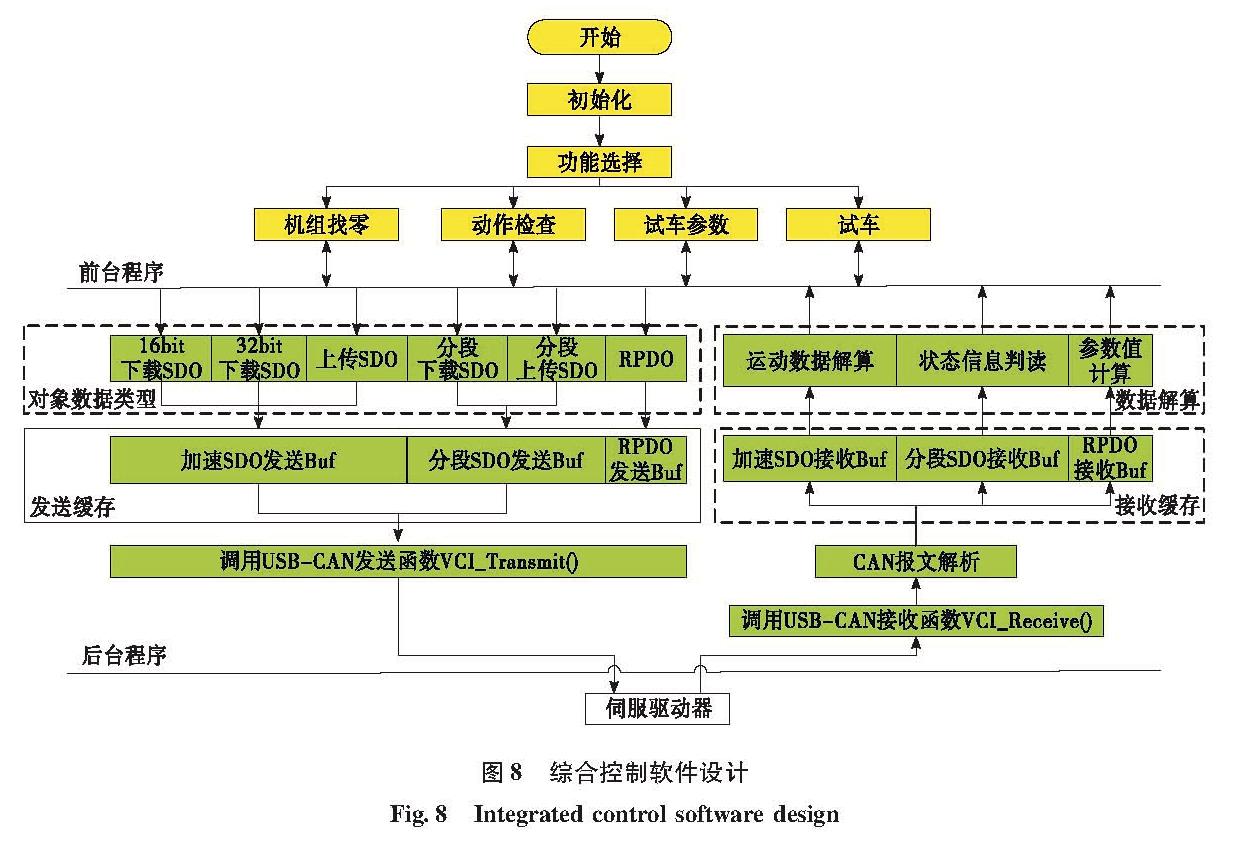
综合控制软件设计按照功能划分为前台程序和后台程序,前台程序响应人机交互的指令和数据,在发送线程中响应用户通过人机交互界面执行的操作指令,进行数据处理后按照CANopen协议要求构建CAN数据报文放入发送数据队列,同时在接收线程中获取伺服驱动器上传的CAN报文并根据CANopen协议进行数据包解析,获取伺服驱动器上传的运动数据、状态信息和参数值; 后台程序按照20 ms周期发送/接收CAN总线报文,发送与接收操作间隔10 ms,保证CAN总线数据交互稳定性,综合控制软件架构如图8所示。
图8 综合控制软件设计
Fig.8 Integrated control software design
2.2.2 综合控制软件功能模块
根据发动机试车功能需求,将综合控制软件进行了逻辑功能划分,主要包括:机组找零模块、动作检查模块、试车参数模块、试车模块及设备参数/信息模块。
1)机组找零模块
该模块实现滚轴丝杠机组运动至机械限位点的功能,需要向伺服驱动器发送“找零”指令并对机组“找零”动作过程进行实时监测,该模块支持找零运动模式(Home)参数在线配置。找零功能配置/启动/停止按照伺服驱动器指令集要求进行适配,具体方式如图9所示。
找零模块使用伺服驱动器的特殊控制模式提供了试车试验前燃气分流阀自动调节至最小开度的功能——燃气分流阀停留在任意开度位置时,需要将燃气分流阀调节至最小开度。为完成此功能采用上述的电机找零控制功能,在此功能模式下电机堵转电流门限值较小,燃气分流阀开度在到达最小开度位置时可以立即控制电机停止转动,避免对机械结构进行损伤。
图9 CANopen协议实现找零功能
Fig.9 CANopen protocol inplements "Home" function
2)动作检查及试车模块
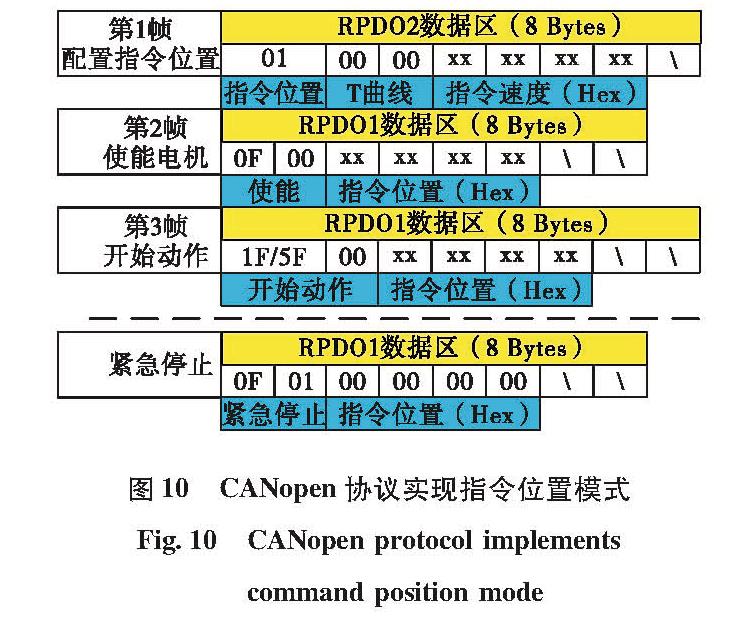
动作检查模块能够按照预配置的运动参数(曲线类型、指令速度、指令加/减速度)控制滚轴丝杠机组运动,并对机组运动过程进行实时数据/状态监测。试车模块能够响应触发信号后自动按照预配置的时间—位置序列控制机组完成指令位置运动,并对机组运动过程进行实时数据/状态监测。机组按照指令位置模式配置启动/停止按照伺服驱动器指令集要求进行适配,具体实现方式如图 10所示,试车模块UI界面如图 11所示。
3)试车参数模块
试车参数模块提供发动机试车试验参数管理配置接口,采用时刻—位置序列表的方式配置机组时序工况,并提供机组运动参数配置接口,是试车自动时序的设定窗口。
4)设备参数/信息模块
设备参数/信息模块提供伺服驱动器工作参数查看和配置模块,包括伺服驱动器的保护参数、伺服控制参数、设备信息参数等。
图 10 CANopen协议实现指令位置模式
Fig.10 CANopen protocol implements command position mode
图 11 试车UI界面
Fig.11 UI interface of trial
3 系统功能验证
本文所研究的综合控制系统实物如图 12所示,该系统已经过伺服电机性能试验、燃气分流阀总装、发动机液流试验、发动机半系统联试的验证。系统重要参数配置为:
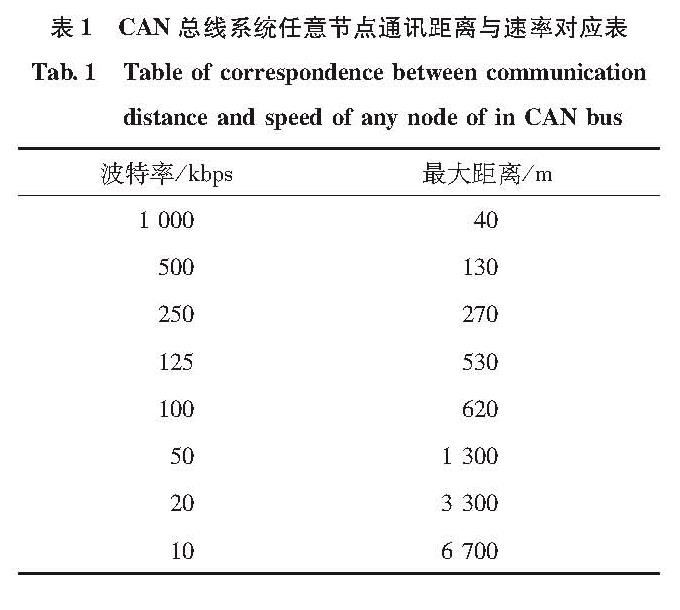
1)CAN设备通信波特率[23-25]配置为250 kbps。
2)心跳周期为100 ms。
3)PDO发送/接收周期为20 ms,SDO发送/接收周期为20 ms。
图 12 综合测控系统实物图
Fig.12 Real product picture of integrated control system
4)电机控制采用位置环控制模式。以下是应用综合控制系统的试验结果,各控制性能指标完全满足系统要求。
3.1 CAN总线重要参数
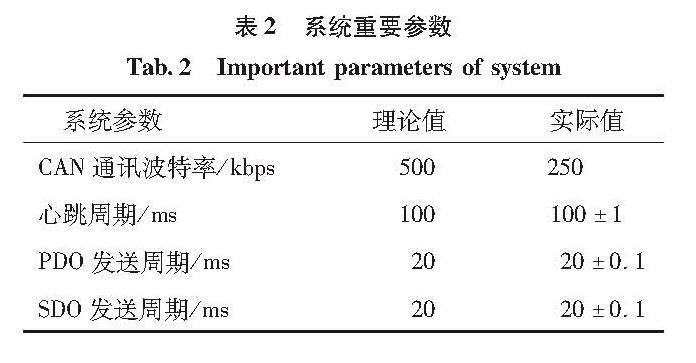
综合测控系统关于CAN总线通讯的重要参数如表 2所示,主要包括CAN通讯波特率、心跳周期、PDO通讯周期、SDO通讯周期等参数。根据发动机试验台环境需求,在综合测控系统过程中必须使用长度150 m的电缆,CAN通讯使用500 kbps波特率出现总线数据阻塞,数据通讯异常现象,因此将波特率配置改为250 kbps,能够满足发动机试车的通讯速度需求。
表2 系统重要参数
Tab.2 Important parameters of system
3.2 伺服控制性能指标
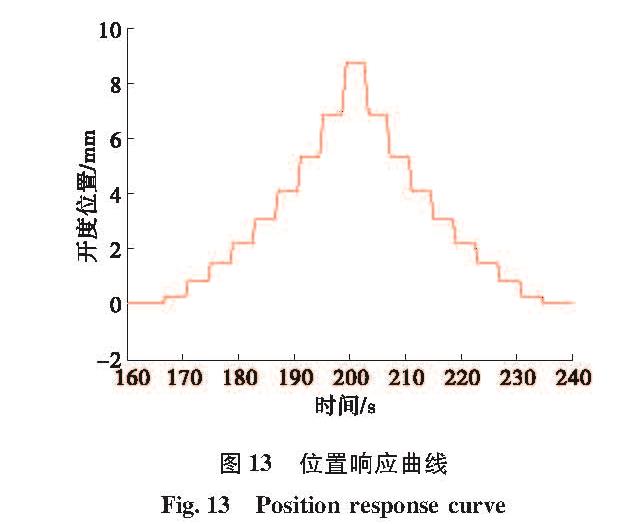
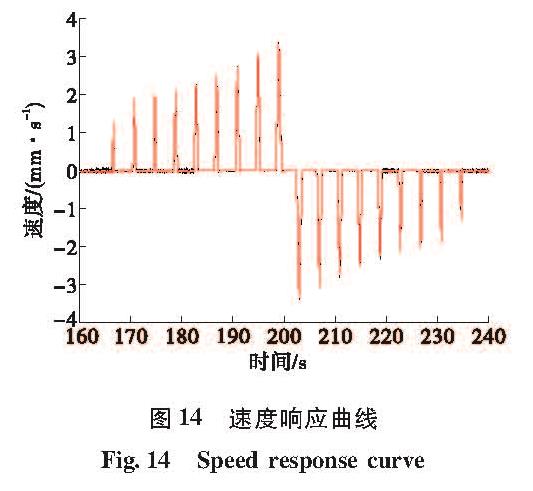
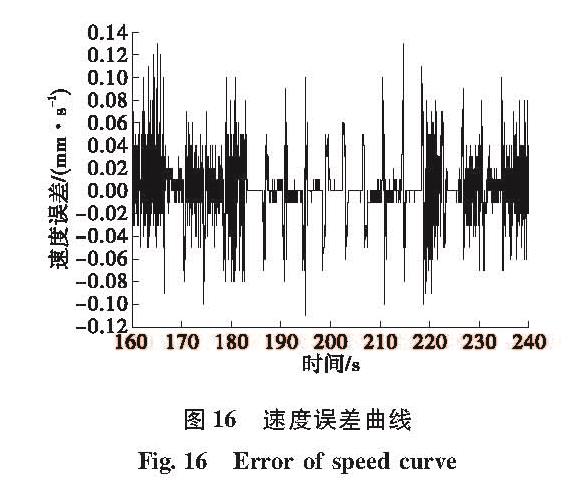
根据试车试验数据分析,线性位移伺服机组的指令位置响应曲线如图 13所示,实际位置曲线与指令位置曲线基本重合,指令速度响应曲线如图 14所示,实际速度曲线与指令曲线基本重合。位置和速度误差曲线分别如图 15和图 16所示。
图 13 位置响应曲线
Fig.13 Position response curve
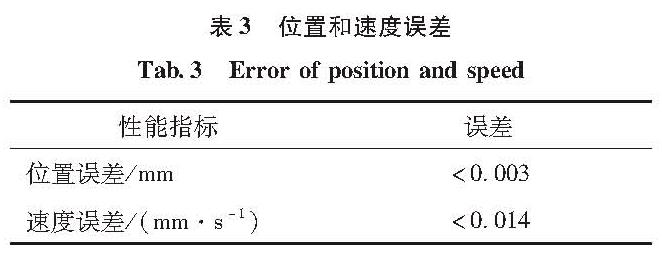
位置和速度误差如表 3所示,位置控制误差为0.003 mm,控制精度小于1%,完全满足位置控制的需求; 速度控制误差为0.014 mm/s,控制精度小于0.5%,完全满足速度控制的需求。
图 14 速度响应曲线
Fig.14 Speed response curve
图 15 位置误差曲线
Fig.15 Error of position curve
图 16 速度误差曲线
Fig.16 Error of speed curve
表3 位置和速度误差
Tab.3 Error of position and speed
4 结语
本文详细论述了基于CANopen协议的综合测控系统工作原理、系统架构及软件设计等内容,并且首次在发动机测控系统中应用。对于CANopen协议的研究和基于C/C++语言的CAN总线通讯及CANopen协议栈的开发,其通用性和易拓展性对后续发动机测控系统研发工作的推进具有研究意义和实用价值。