收稿日期:2020-06-12
基金项目:探月工程研制保障条件项目
作者简介:刘万龙(1982—),男,博士,高级工程师,研究领域为火箭发动机试验及测试技术。
基金项目:探月工程研制保障条件项目
作者简介:刘万龙(1982—),男,博士,高级工程师,研究领域为火箭发动机试验及测试技术。
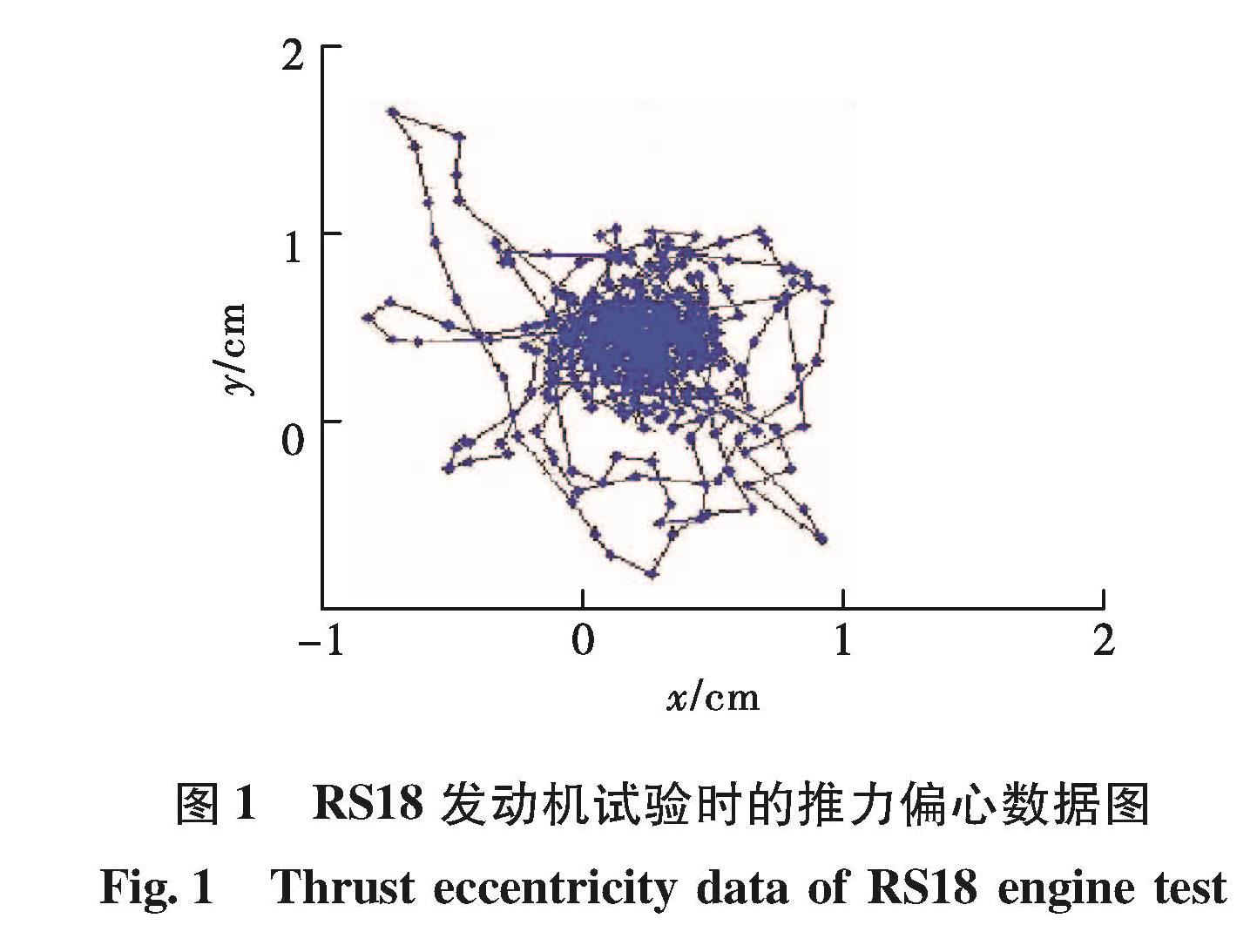
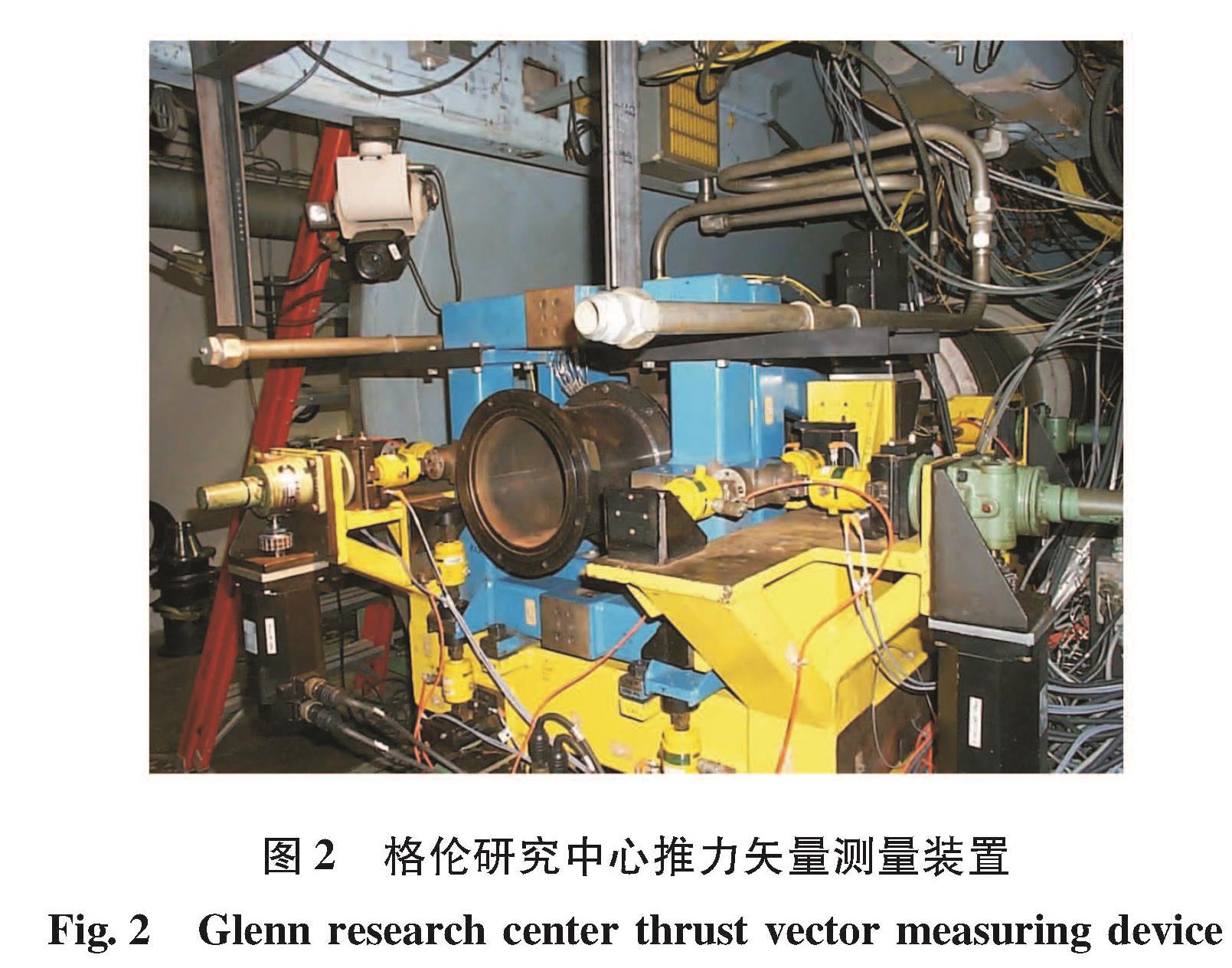
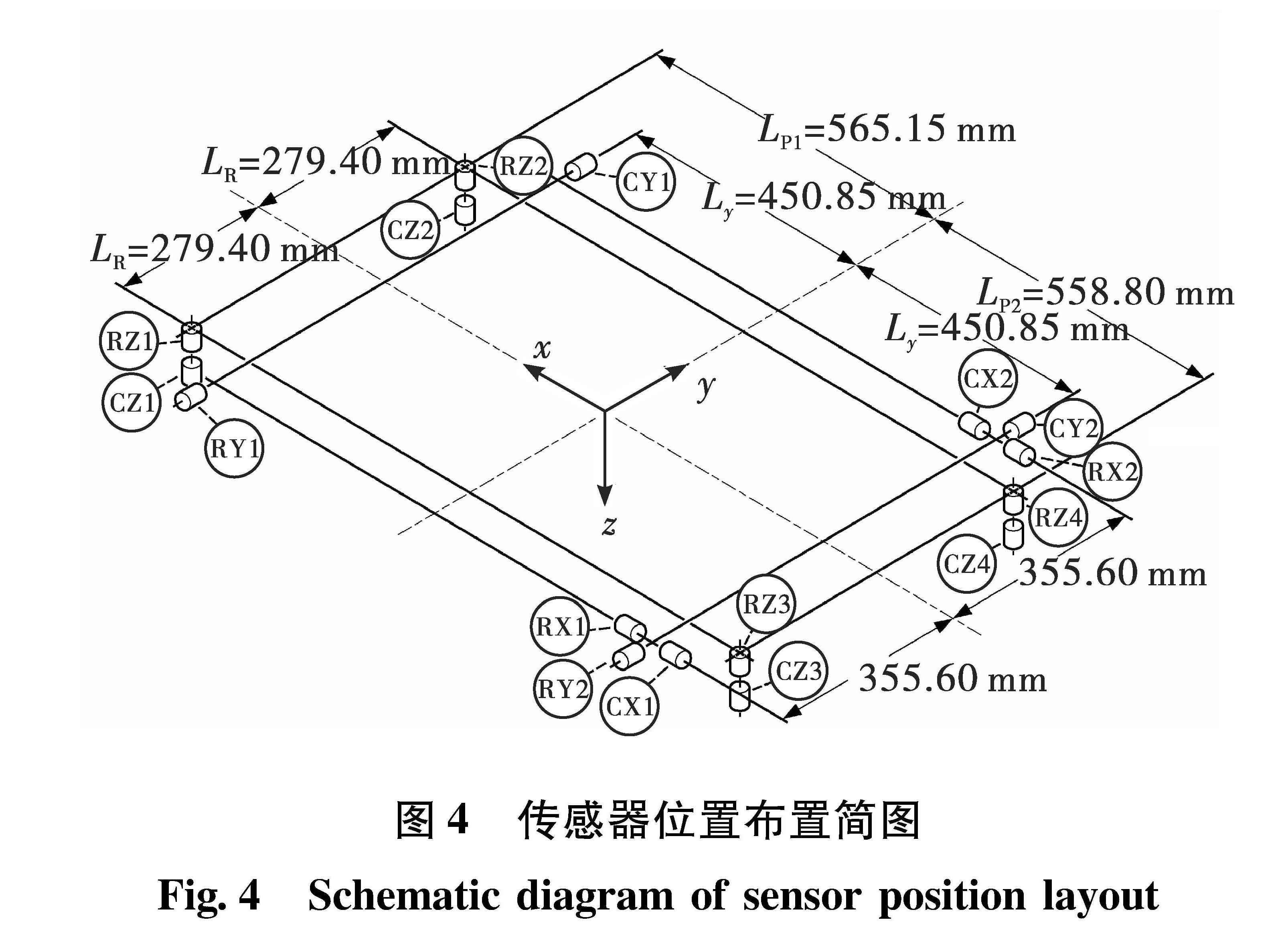
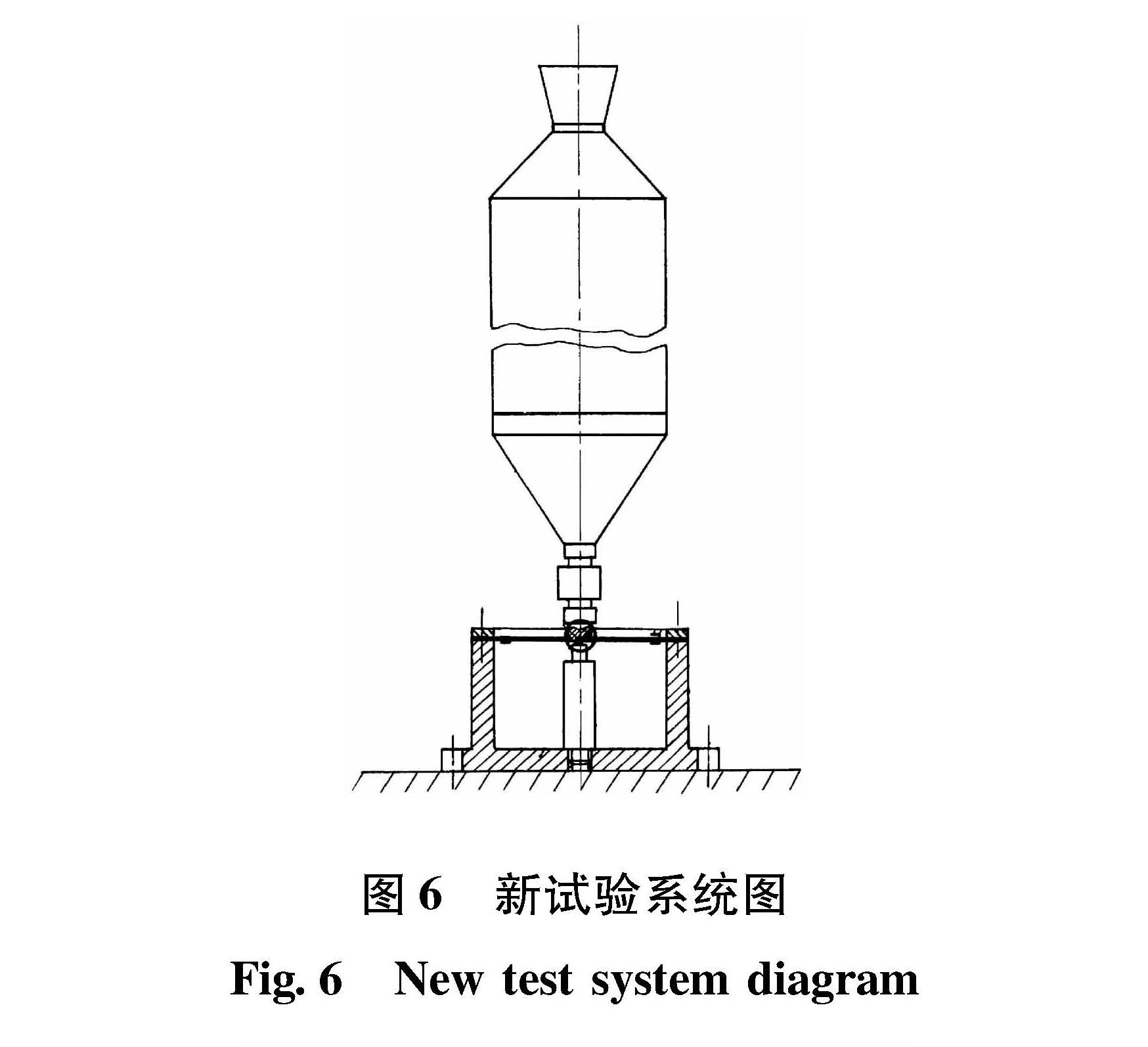
理想状态下,火箭发动机推力作用线与发动机中心轴线重合,但由于加工精度、高温高压燃气在喷管中的不对称流动以及喷管喉部烧蚀等原因,导致发动机推力实际作用线偏离发动机理论中心轴线,从而产生推力偏心。火箭发动机的推力是一个空间向量,在火箭发动机工作过程中,它的大小、方向和作用点位置都是随时间不断变化的。推力矢量对飞行器的飞行轨迹有重大影响。鉴于火箭发动机推力矢量测量的需要,美国等西方国家对此进行了较多研究,但由于技术保密的原因,介绍其推力矢量测量装置的文献比较少。对收集到的一些国外资料进行整理。介绍了推力矢量的基本概念,对美国、日本、俄罗斯和韩国的火箭发动机推力矢量测量装置进行了概述,可以为国内同行提供参考。
In an ideal state,the rocket engine thrust line of action is coincided with the center axis of the engine.But due to the machining accuracy,the asymmetric flow of high-temperature and high-pressure gas in the nozzle,and the ablation of the nozzle throat,the actual engine thrust line is deviated from the theory thrust line.The rocket engine thrust is a space vector.During the operation of the rocket engine,the size,direction and the application point position of the thrust are constantly changing with time.The flight trajectory of the aircraft is significantly affected by the thrust vector.In view of the need of rocket engine thrust vector measurement,more research on rocket engine thrust vector measurement device had been conducted in the United States and other western countries.However,due to the reason of technical secrecy,the literatures of thrust vector measuring device are relatively few.In this paper,some overseas materials of rocket engine thrust vector measurement device were collected.The basic concept of the thrust vector were introduced in this paper.An overview of the thrust vector measuring device of rocket engine in the United States,Japan,Russia and South Korea was given in this paper,which can be provided as reference for domestic counterparts.