基金项目:科工局稳定支持项目(HTKJ2020KL011007)
作者简介:闫松(1988—),男,博士,研究领域为结构动力学模型修正、载荷识别,非接触测试。
作者简介:闫松(1988—),男,博士,研究领域为结构动力学模型修正、载荷识别,非接触测试。
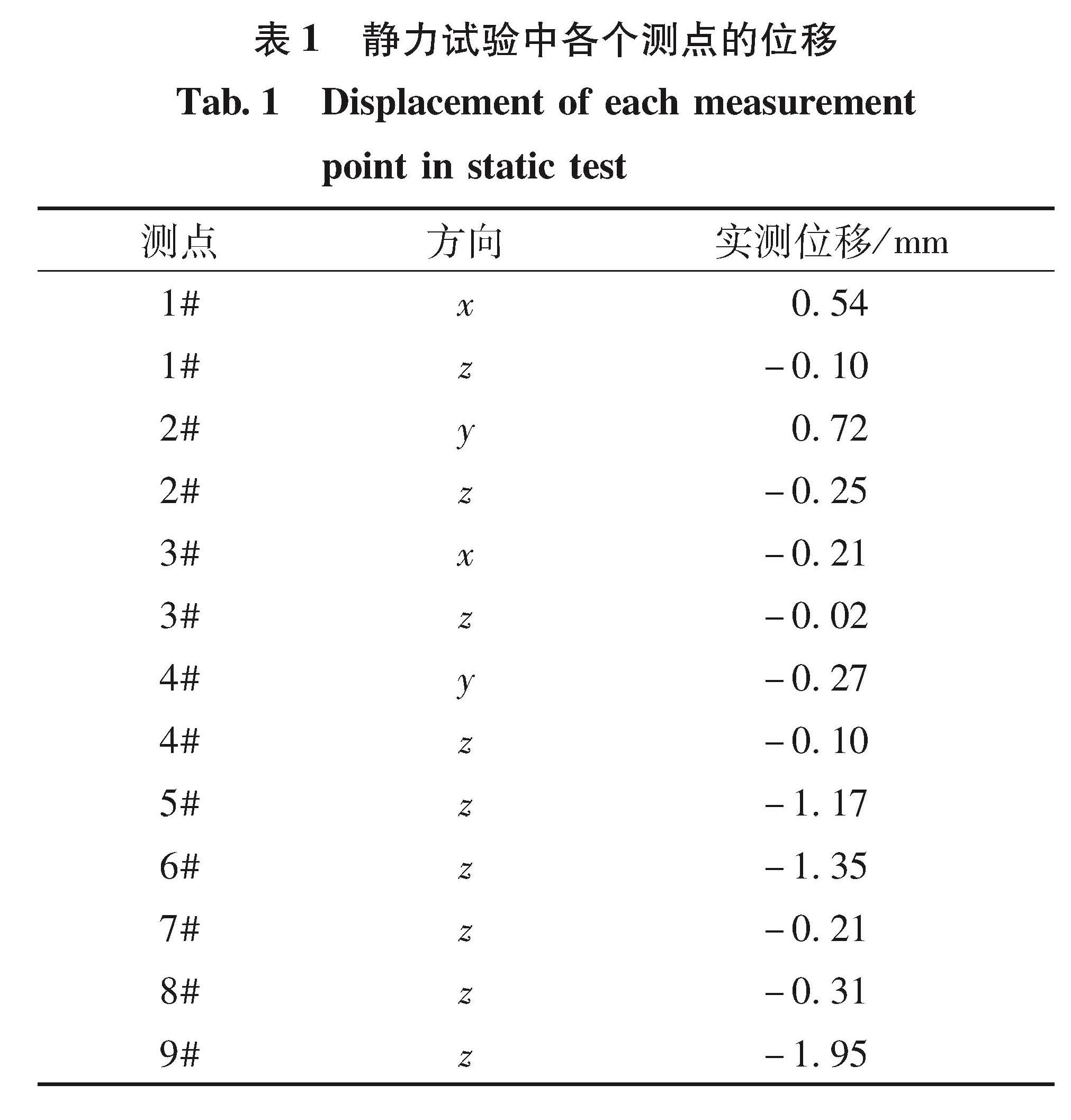
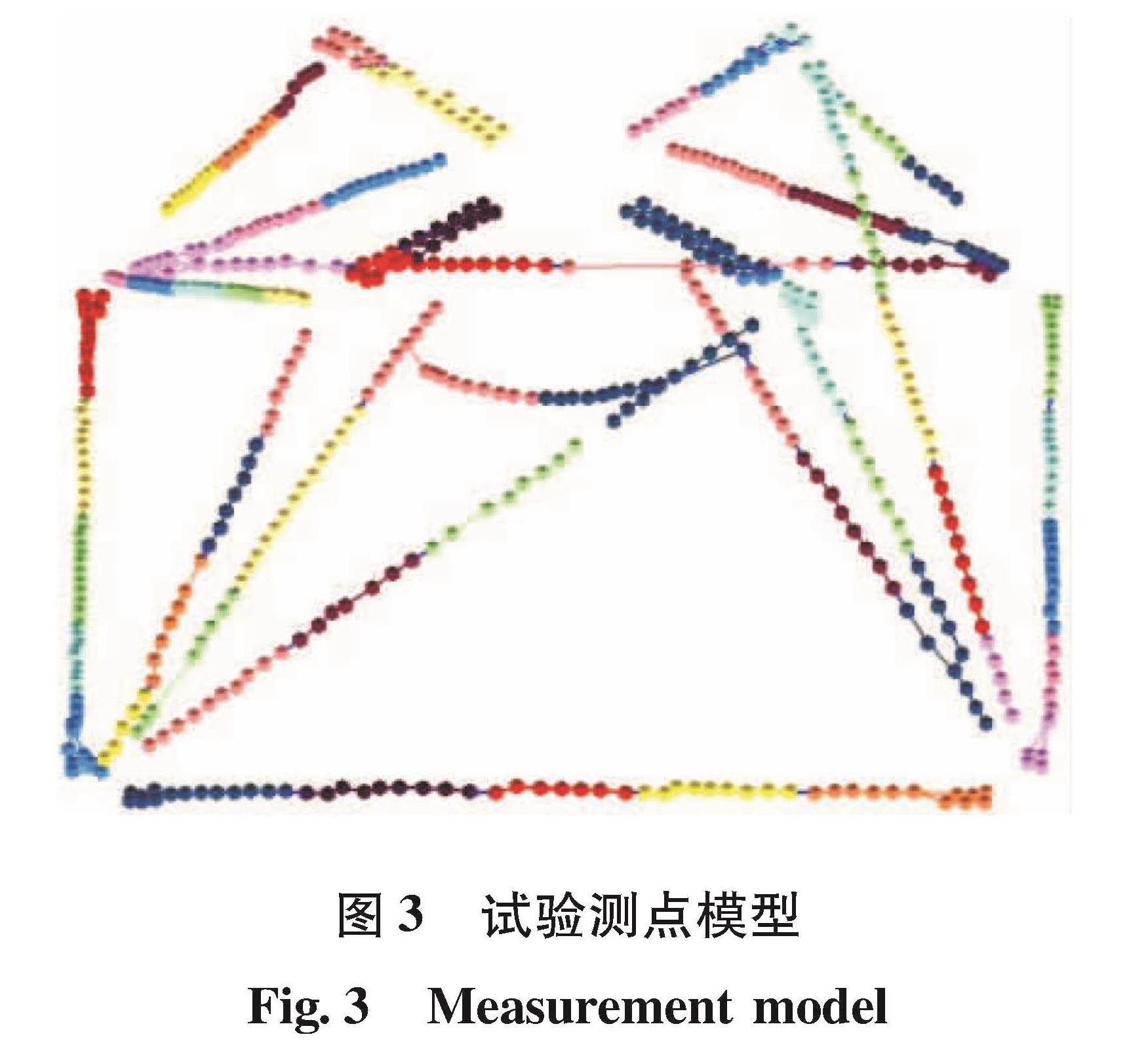
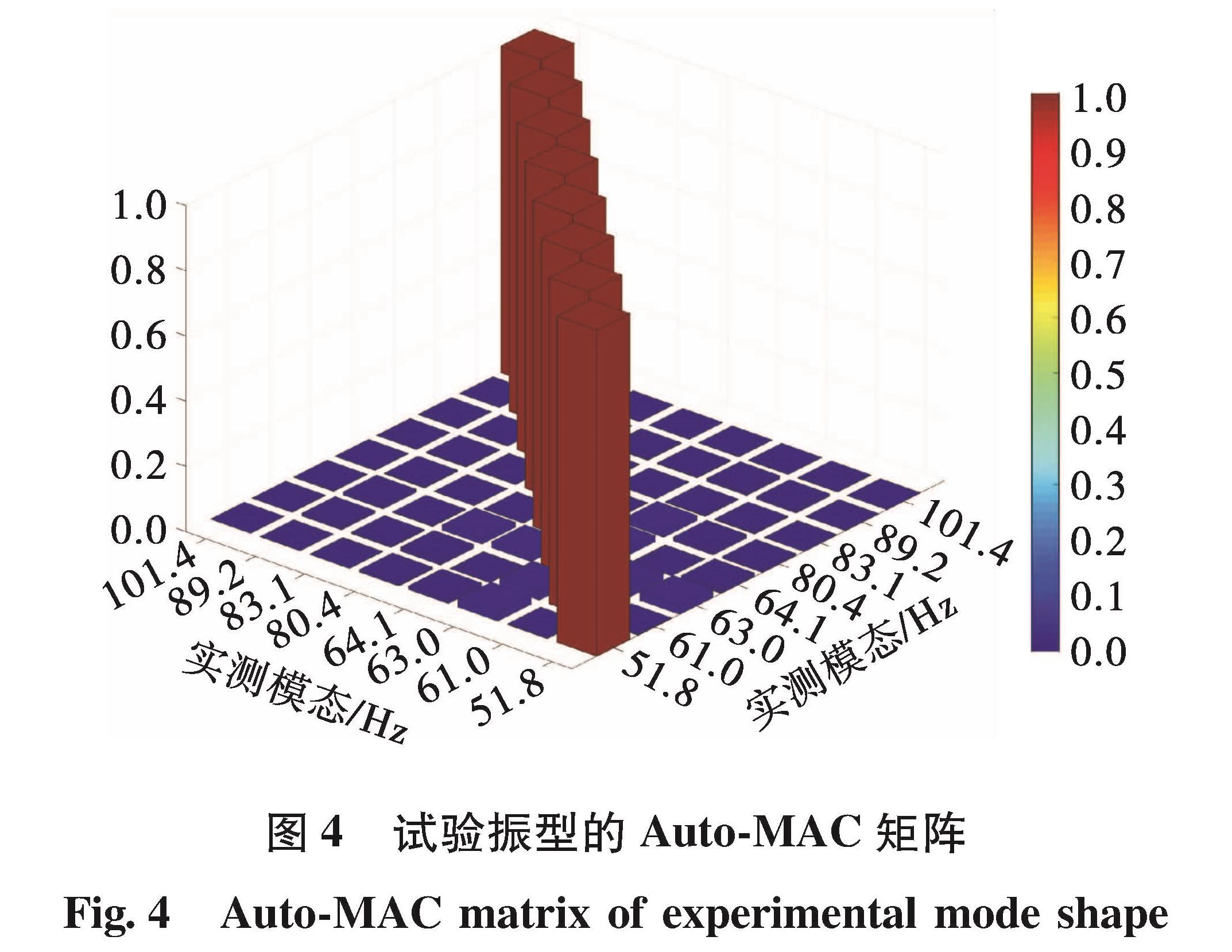
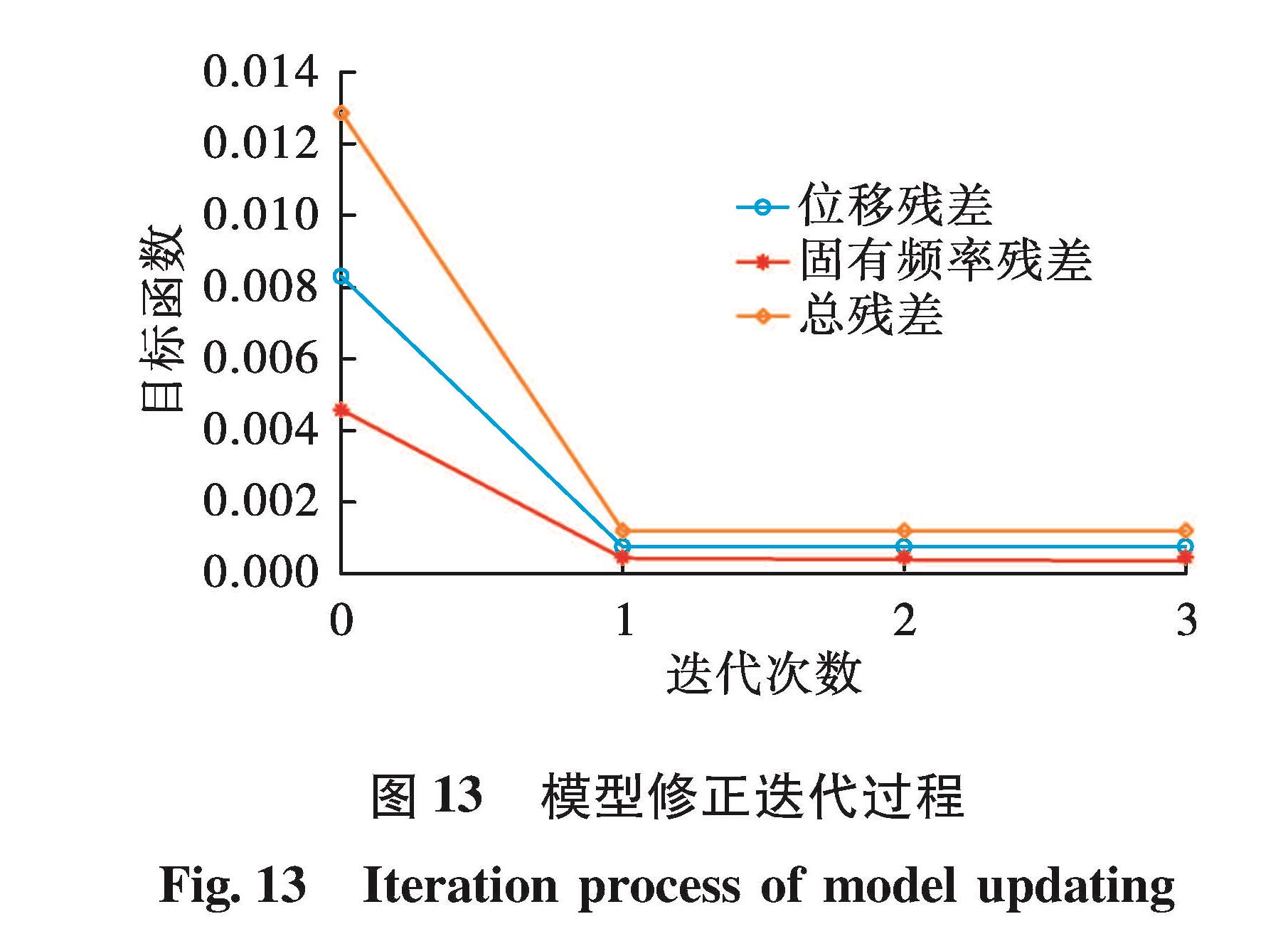
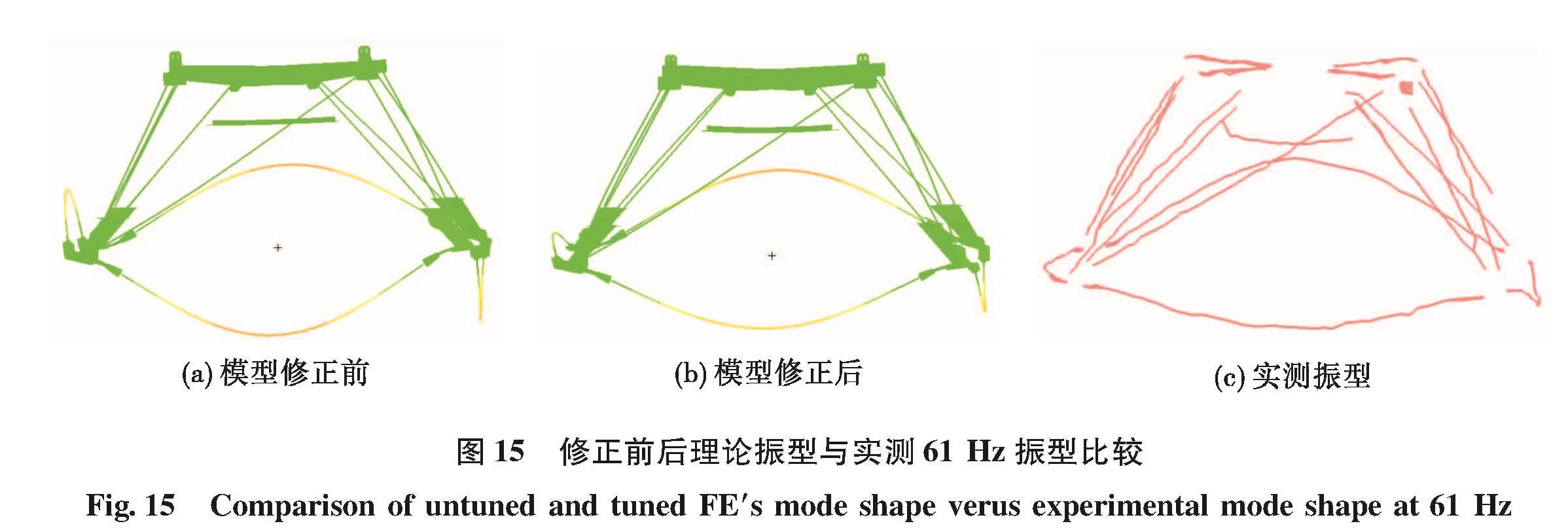
为了获得准确的液体火箭发动机机架的结构动力学模型,采用精细化的结构动力学建模方法,建立了可以同时反映机架静力和动力学特性的详细有限元模型,并以两种状态下实测数据对机架模型进行了进一步修正。开展了固支状态下的静力试验,获得了机架上关键测点的位移响应; 开展了自由状态下的模态试验,获得了自由状态下机架的固有频率和振型; 最后以静力试验的位移数据和模态试验的固有频率数据为目标函数,对机架各部分材料的弹性模量中关于位移和频率最灵敏的6个参数进行了修正。结果 表明:修正后的机架模型不仅在修正采用的频率范围内与实测值吻合得很好,而且在修正采用的频率范围外理论和试验结果的相关性也有较大提高。模型修正中联合静态响应数据和动力学数据是可行的,静力学试验结果可以提供模态试验中得不到的信息,有利于模型修正过程。
In order to obtain an accurate structural dynamic model of thrust frame in liquid rocket engine,a detailed structural dynamics modeling approach was adopted to establish a detailed finite element(FE)model that can simultaneously describe the static and dynamic characteristics of the frame.The established model was further updated according to two different types of test data. The static test under the fixed support state was carried out,and the displacement response of the key measuring points on the frame was obtained. The modal test under the free state was carried out,and the natural frequency and mode shape under this state were identified. Finally,using the obtained displacement data and the natural frequencies as the objective function,the six most sensitive parameters to displacement and frequency in the elastic modulus of frame materials were updated. The results show that the updated frame model agrees well with the measured values not only within the frequency range used in the correlation,but also beyond the frequency range used in the correlation. It is feasible to combine static response data and modal test data in the model updating. The static test results can provide the information that is not available in the modal test,which is beneficial to the model updating process.