2.1 固体火箭发动机推力类型
固体火箭发动机通常通过调节推力形式进行能量管理[15-20],常用的推力形式主要包括单推力、单室双推力和多脉冲3种,见图2。
图2 典型固体发动机推力形式
Fig.2 Typical thrust types of solid rocket motor
本文采用类似“匕首”的单级不分离导弹为算例,规模上进行一定缩比。飞行器长度7 m,直径0.6 m,质量2 000 kg,推进剂质量1 100 kg,飞行器投放高度10 km,投放速度0.8 Ma。
开展单推力、多脉冲、单室双推力3种动力形式、不同推力特性参数下的弹道分析。其中,单推力、多脉冲、单室双推力助推段压强按照10 MPa考虑,10 km高度比冲270 s; 单室双推力续航段考虑压强降低,结合式(10)对10 km比冲进行修正。
2.2 单推力特性影响分析
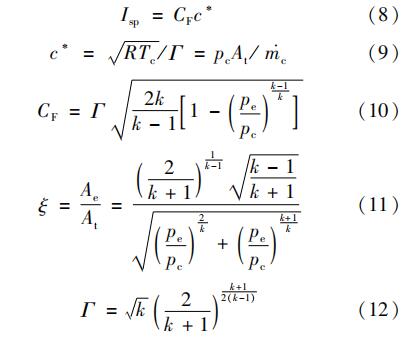
在总冲一定前提下,分析单推力发动机不同推力-时间特性对飞行器综合性能的影响。发动机燃烧室压强按10 MPa考虑,特征速度c*取1 600 m/s,喷管出口压强按10 km高度设计,根据式(7)~式(12)得到4种不同工作时间下发动机主要性能(见表1)。
对不同发动机状态最高点前飞行弹道进行优化分析,获取典型最优攻角-时间曲线(见图3)。结果表明,在满足约束条件前提下,主动段采用大攻角快速拉起,爬升段以0°攻角爬升,获得的弹道最高点能量最大; 同时,发动机推力越大,所需要的拉攻角时间就越短。
表1 单推力方案参数
Tab.1 Parameters of single thrust schemes
图3 单推力方案攻角-时间曲线
Fig.3 Angle of attack-time curve of single thrust schemes
对比不同推力-时间特性下弹道关键指标,具体结果见表2。关机点、最高点速度变化情况见图4,助推段射程-高度曲线见图5。
表2 弹道关键参数对比(单推力方案)
Tab.2 Comparison of ballistic key parameters(single thrust schemes)
图4 单推力方案速度-时间曲线
Fig.4 Velocity-time curve of single thrust schemes
图5 单推力方案射程-高度曲线
Fig.5 Range-altitude curve of single thrust schemes
对比方案1-4与方案1-1结果表明:随着工作时间增加、平均推力减小,飞行器关机点速度减小1.2%,关机点高度增加了20.9%,对应弹道最高点能量增加了2.4%,有利于提高飞行器综合射程能力; 此外,飞行器的最大飞行动压减小了37.9%、动压攻角积减小16.1%、主动段法向过载减小29.0%,有利于系统减重优化。因此,采用单推力方案在保证总冲能力一定前提下,应当尽可能增加发动机工作时间。
2.3 双脉冲推力特性分析
目前应用的多脉冲发动机以双脉冲为主,本文主要针对双脉冲推力特性开展研究。以单推力方案1-4为基线,构建不同间隔时间双脉冲发动机方案,具体见表3。
对不同双脉冲推力的飞行弹道进行优化,最优攻角-时间曲线见图6。结果表明,采用Ⅰ脉冲大攻角拉起,间隔段恒定攻角过渡,Ⅱ脉冲小攻角继续拉起的弹道能够实现特定约束下最高点能量最大; 随着脉冲间隔时间的不断增大,Ⅱ脉冲对爬升攻角的需求逐渐增大。
表3 双脉冲方案参数
Tab.3 Parameters of dual-pulse thrust schemes
图6 双脉冲方案攻角-时间曲线
Fig.6 Angle of attack-time curve of dual-pulse thrust schemes
不同双脉冲方案对应的弹道关键指标统计情况见表4。最高点前速度、高度、动压变化情况见图7~图9。
表4 弹道关键参数对比(双脉冲方案)
Tab.4 Comparison of ballistic key parameters(dual-pulse thrust schemes)
图7 双脉冲方案速度-时间曲线
Fig.7 Velocity-time curve of dual-pulse thrust schemes
图8 双脉冲方案射程-高度曲线
Fig.8 Range-altitude curve of dual-pulse thrust schemes
图9 双脉冲方案动压-时间曲线
Fig.9 Dynamic pressure-time curve of dual-pulse thrust schemes
表4仿真结果表明:相比于单推力方案,当脉冲间隔时间为10 s时,双脉冲关机点速度降低1.2%,关机点高度增加13.5%,对应弹道最高点能量基本相当,最大动压降低21.7%,法向过载积分降低7.1%; 当脉冲间隔时间大于10 s,弹道最高点能量最大下降3.0%,最大飞行动压基本不变。因此,选择合适的双脉冲间隔时间,可以在保证能量不损失情况下降低飞行动压,有助于飞行器结构减重设计。
2.4 单室-双推特性分析
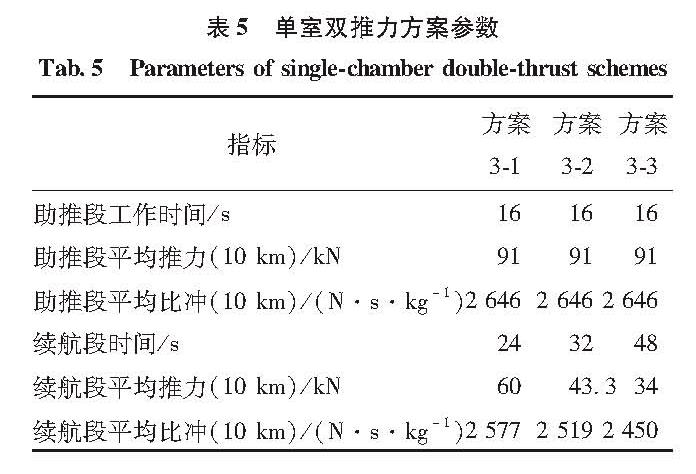
以单推力方案1-4为基线,构建不同推力比下的单室双推力方案,其中续航段考虑工作压强降低对比冲进行修正,具体参数见表5。
表5 单室双推力方案参数
Tab.5 Parameters of single-chamber double-thrust schemes
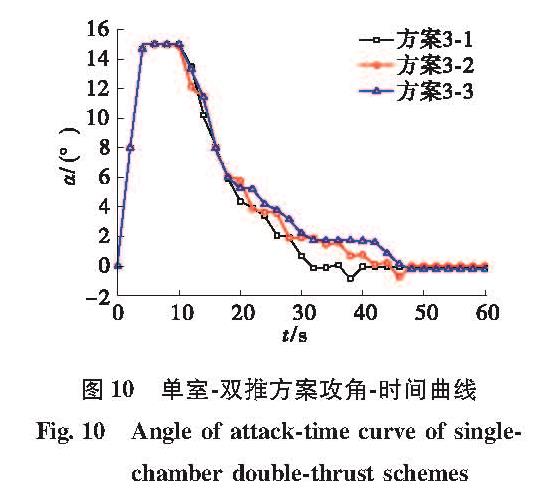
对单室-双推动力形式的飞行弹道进行优化,最优攻角-时间曲线见图 10。结果表明,采用助推段大攻角、续航段小攻角、惯性飞行段零攻角的弹道爬升方案能够实现特定约束下最高点能量最大化。
图 10 单室-双推方案攻角-时间曲线
Fig.10 Angle of attack-time curve of single-chamber double-thrust schemes
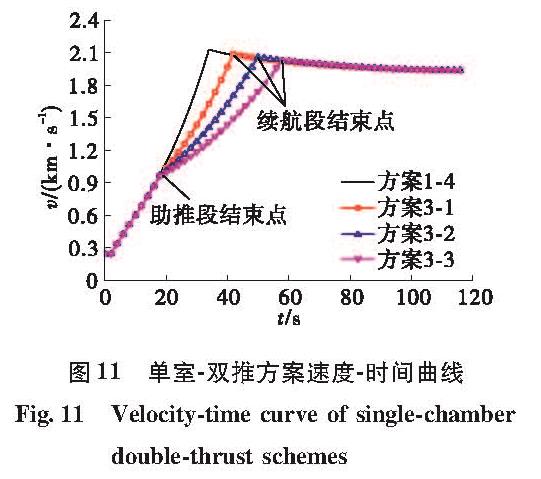
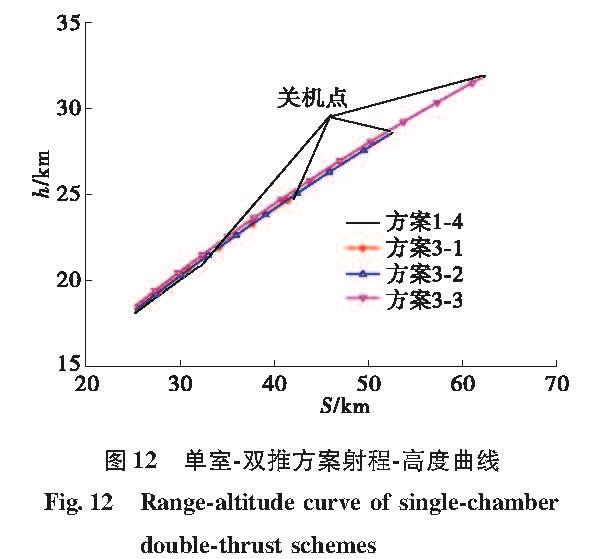
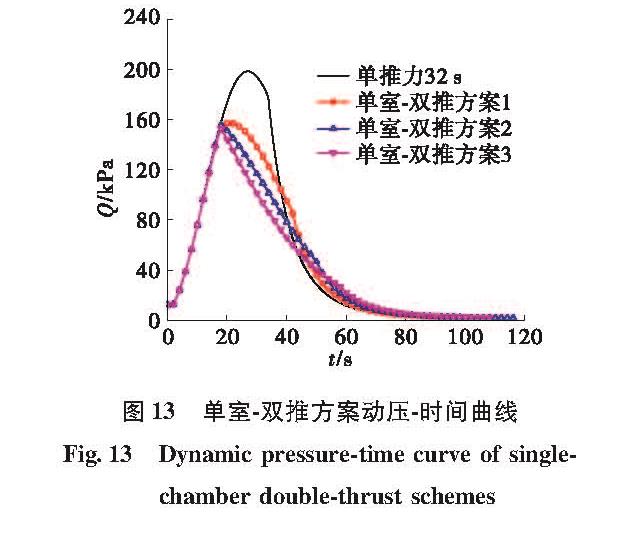
不同推力比单室-双推发动机方案对应的弹道关键指标对比情况见表6。最高点前速度、高度、动压变化情况见图 11~图 13。
表6仿真结果表明:相比于单推力方案,随着单室-双推力两级推力比增加,飞行器关机点速度降低2.1%~4.6%,关机点高度增加19.7%~ 54.3%,最大动压降低20.7%,法向过载积分增加3.8%~13.4%,最高点能量基本维持不变。因此,采用单室双推力方案虽然增加了续航段工作时间,但续航段比冲同步下降,在综合作用并未体现出明显的能量优化特性。
表6 弹道关键参数对比(单室-双推方案)
Tab.6 Comparison of ballistic key parameters(single-chamber double-thrust schemes)
图 11 单室-双推方案速度-时间曲线
Fig.11 Velocity-time curve of single-chamber double-thrust schemes
图 12 单室-双推方案射程-高度曲线
Fig.12 Range-altitude curve of single-chamber double-thrust schemes
图 13 单室-双推方案动压-时间曲线
Fig.13 Dynamic pressure-time curve of single-chamber double-thrust schemes

 (12)
(12) (23)
(23) 为梯度; dα~为增量; Lα~α~(dα~,λ)为Hessian矩阵,可通过BFGS[14]方法求得; gi(α~)、hj(α~)分别为等式、不等式约束条件。
为梯度; dα~为增量; Lα~α~(dα~,λ)为Hessian矩阵,可通过BFGS[14]方法求得; gi(α~)、hj(α~)分别为等式、不等式约束条件。