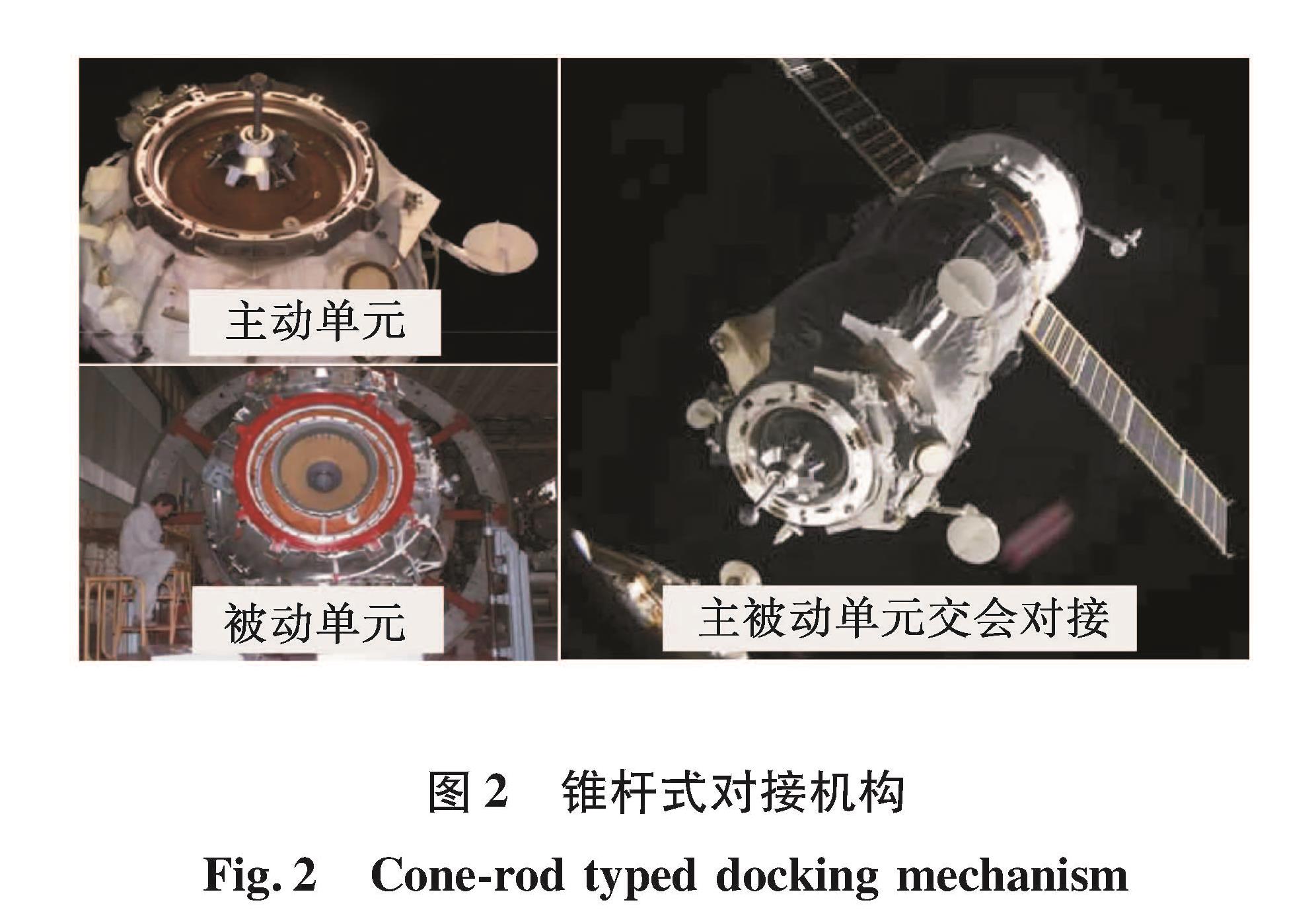
锥杆式对接机构起源于苏联[18],经过苏联对其的不断改进,锥杆式对接机构已广泛应用于航天领域,如载人/货飞船与空间站对接、航天器局部模块更换维修等,技术比较成熟[19],至今俄罗斯的飞船仍采用该形式与国际空间站对接。锥杆式对接机构由主动导向杆单元和被动接纳锥单元组成,两单元周边布置锁紧结构,如图2所示。导向杆最初设计刚度较大,导向杆杆头设计为圆球形结构可以保证在对接过程中和接纳锥始终保持点接触。为了更好地完成交会对接,避免导向杆和接纳锥碰撞弹出,不能捕获,军事科学院优化了接纳锥型面,使得对接杆与接纳锥碰撞后反弹进入捕获区[20]。
图2 锥杆式对接机构
Fig.2 Cone-rod typed docking mechanism
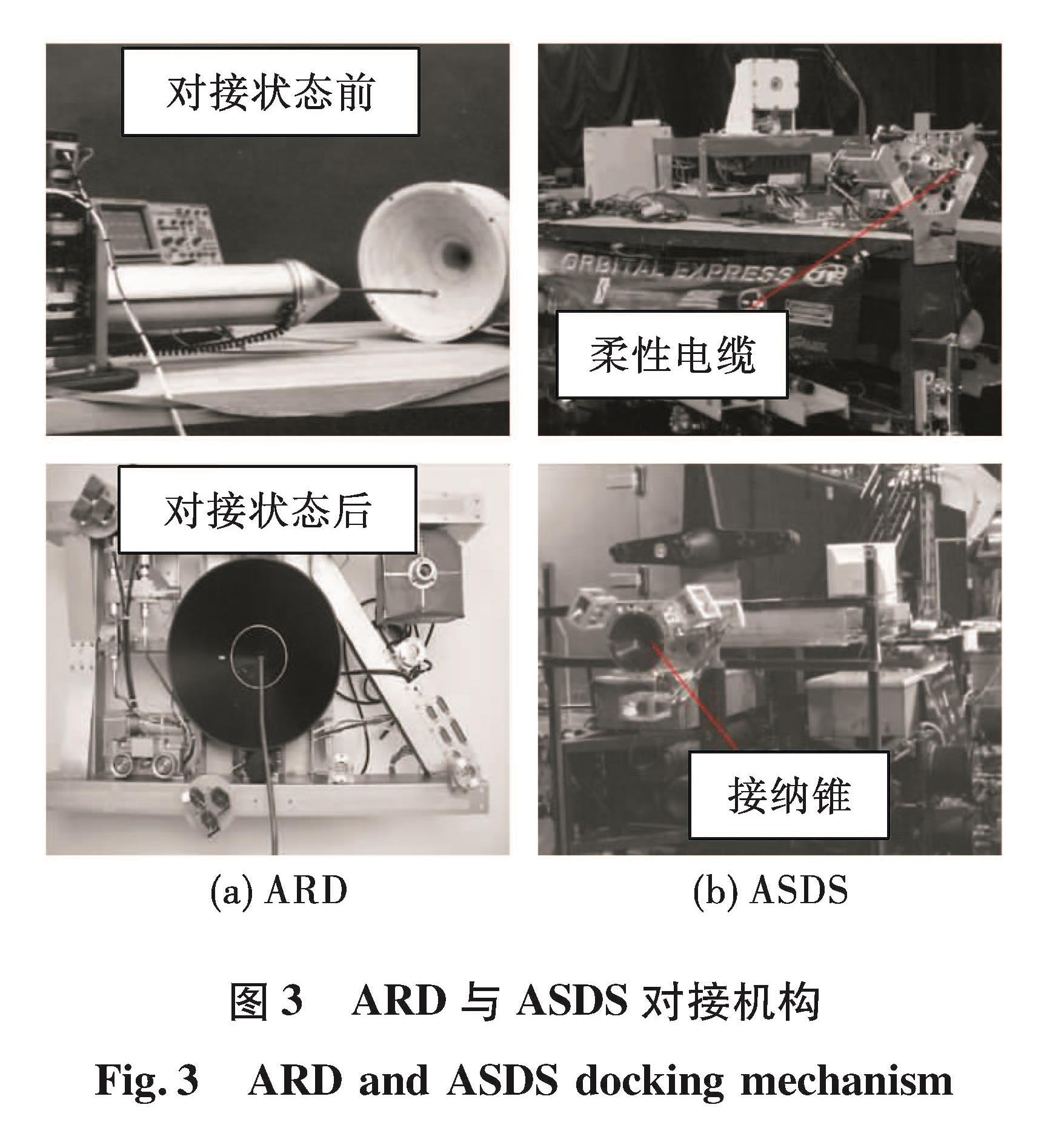
由于刚性导向杆在对接过程中会产生较大的碰撞冲击力,美国密歇根航空航天公司设计了一种占用空间小、体积质量小的自主交会对接系统(autonomous rendezvous and docking system, ARD),如图3(a)所示,ARD的导向杆是一根可以弯曲的电缆,该柔性电缆可以伸展插入被动航天器的接纳锥[21]。为了增大对接接口载荷能力,改进设计了用于大型卫星的自主卫星对接系统(autonomous satellite docking system, ASDS),如图3(b)所示,ASDS改进了锁紧结构,可以保证接口连接的有效性,但是很难实现6自由度对接下的轴向对齐,且用于防止电缆回缩的锁紧机构设计复杂[22]。
图3 ARD与ASDS对接机构
Fig.3 ARD and ASDS docking mechanism
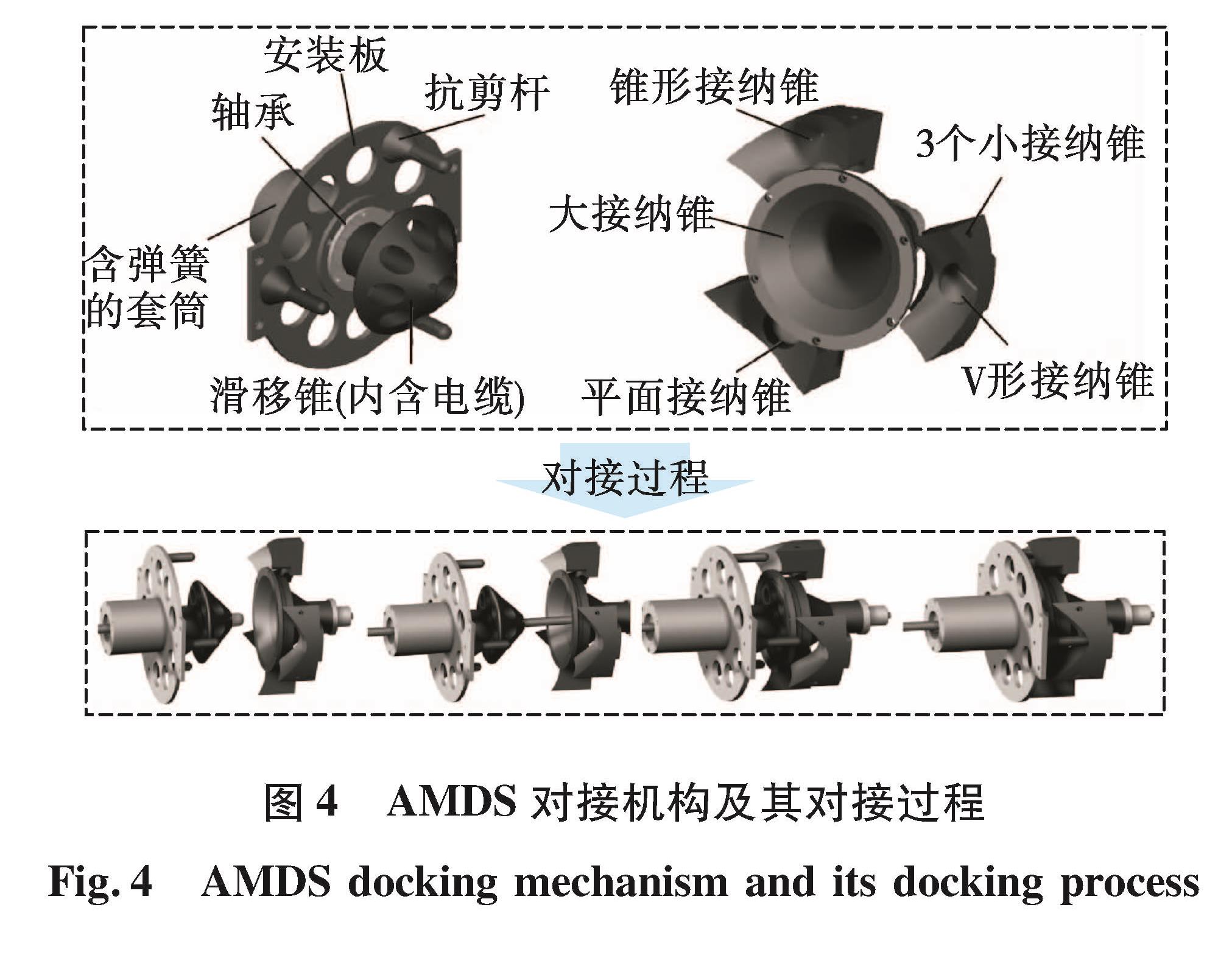
为了适应微型卫星对接,美国密歇根航空航天公司基于ASDS又研制了自主微卫星对接系统(autonomous micro-satellite docking system, AMDS)[23-24]。如图4所示,AMDS中心为柔性电缆,周边均布3个小导向杆,小导向杆杆部为锥形,以便提高整个系统的抗剪切能力,3个小接纳锥分别为平面、锥形、V形,在完全对接后限制机构的6个自由度。
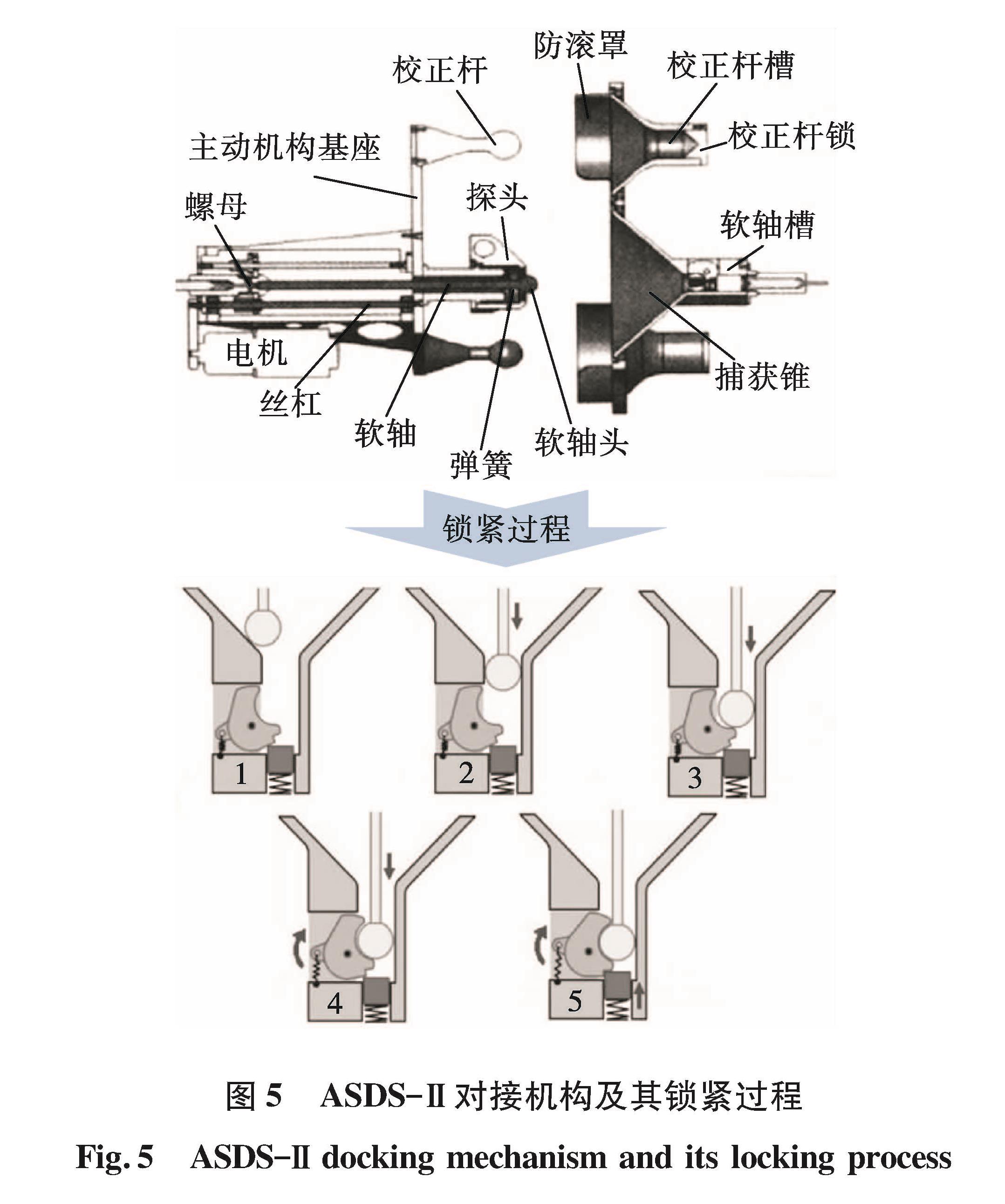
为保证航天器的对接刚性,避免在径向或扭转载荷下发生弯曲,最新的对接机构演化为ASDS—Ⅱ,如图5所示,其与AMDS的结构尺寸大致相同,但通过刚性优化,ASDS—Ⅱ能够在更高的负载下保持界面的对接公差[25]。与ARD的旋转锁紧不同,ASDS—Ⅱ采用弹簧—棘轮,结构简单,可靠性高。
图4 AMDS对接机构及其对接过程
Fig.4 AMDS docking mechanism and its docking process
图5 ASDS—Ⅱ对接机构及其锁紧过程
Fig.5 ASDS—Ⅱ docking mechanism and its locking process
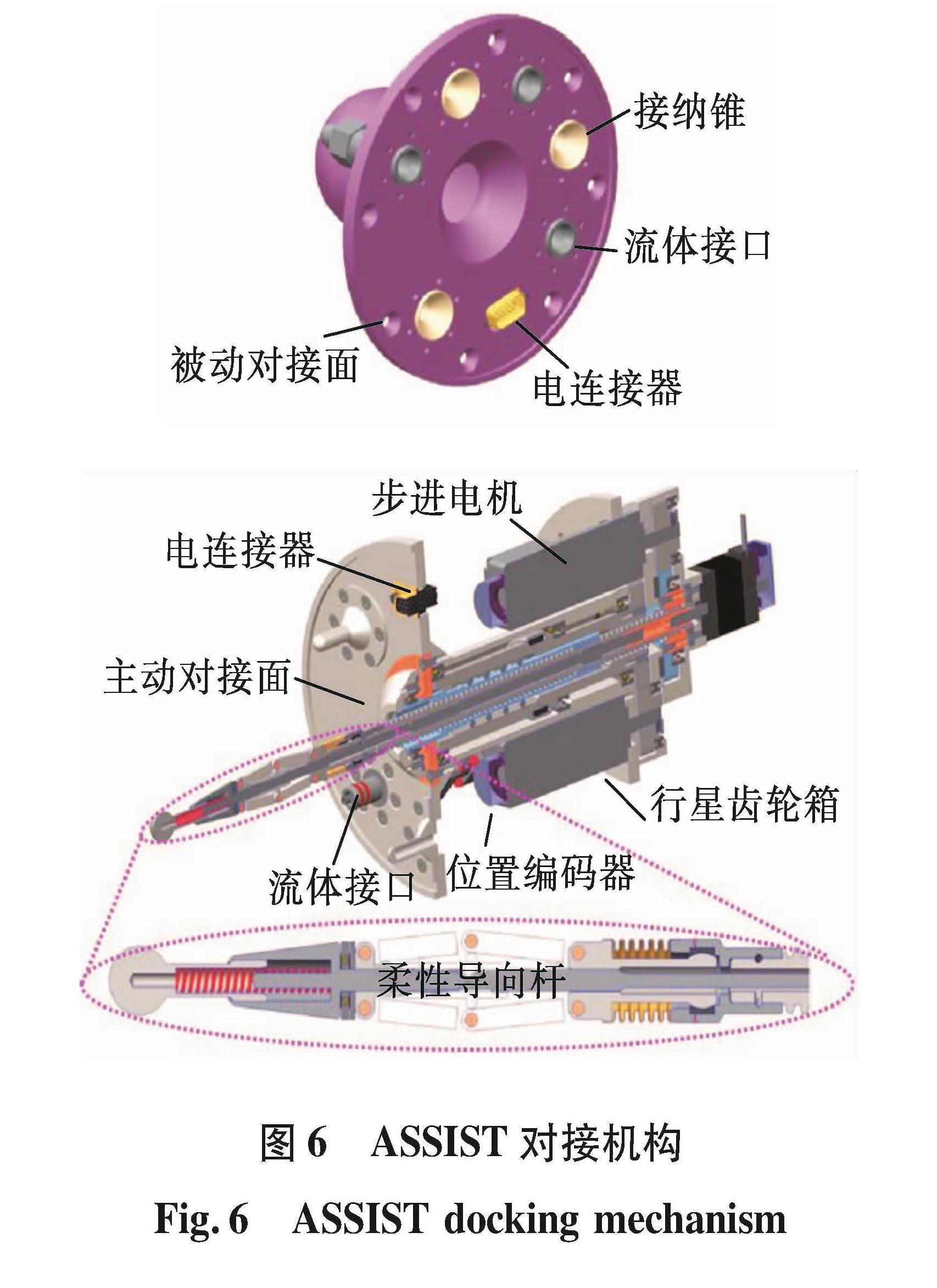
在轨服务的理念来源于方便维护在轨的故障航天器[26],由于航天器的模块化设计,ORU技术是未来延长航天器寿命、在轨替换升级的重要基础[27]。欧洲航天局为了推广空间燃料补给标准,启动了ASSIST研制项目[28]。ASSIST与ASDS—Ⅱ类似,柔性导向杆位于主动单元对接面中心,周边均布3个小导向杆,但是ASSIST对接面布置了4个电液接口,实现了机电液一体化,如图6所示。
图6 ASSIST对接机构
Fig.6 ASSIST docking mechanism
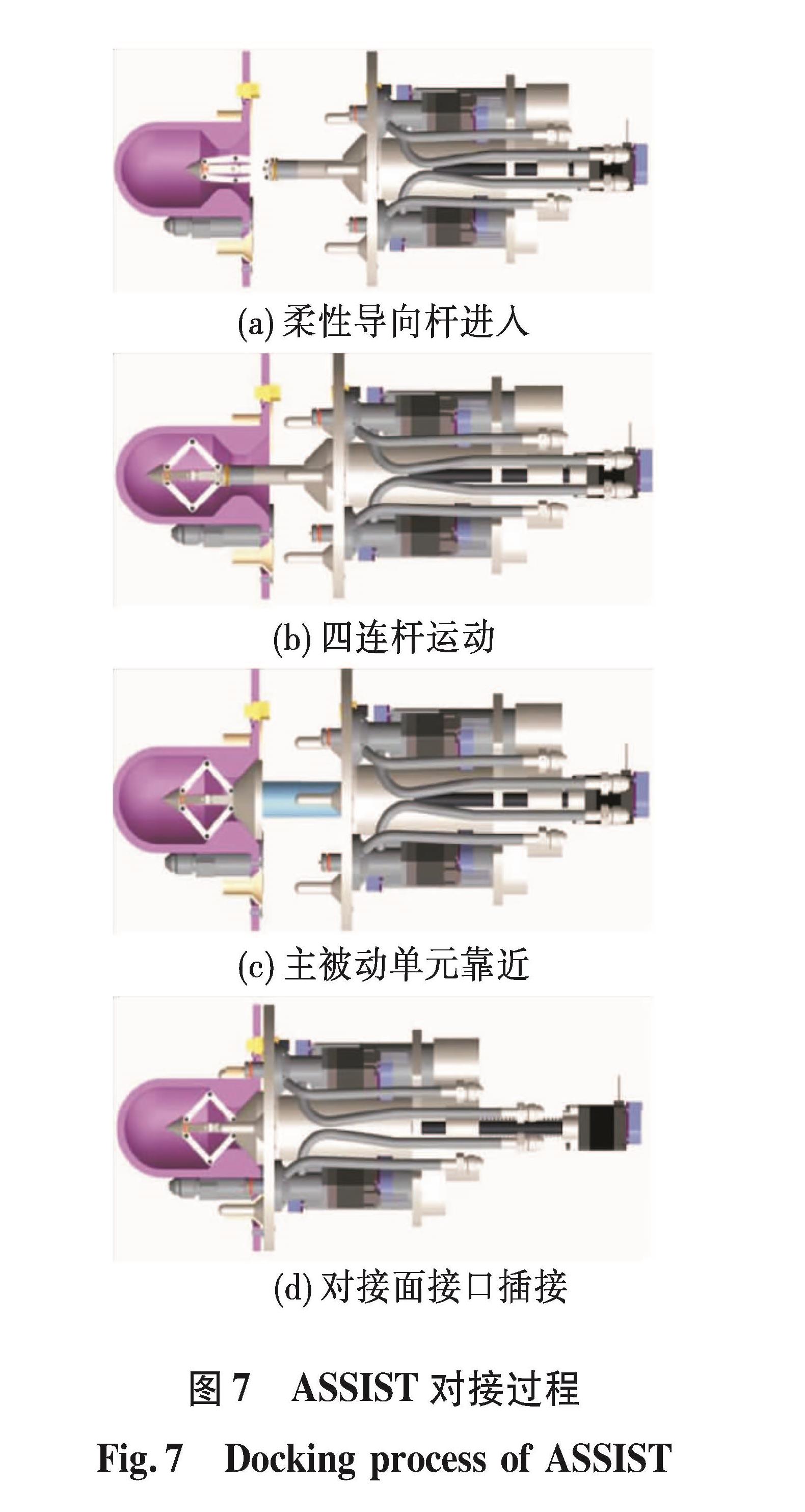
如图7所示,ASSIST通过柔性导向杆实现主被动单元的对接,捕获后由中心丝杠驱动四连杆机构完成单元靠近和电连接器、流体接口的插接,3个小导向杆承受外部扭转载荷。
图7 ASSIST对接过程
Fig.7 Docking process of ASSIST
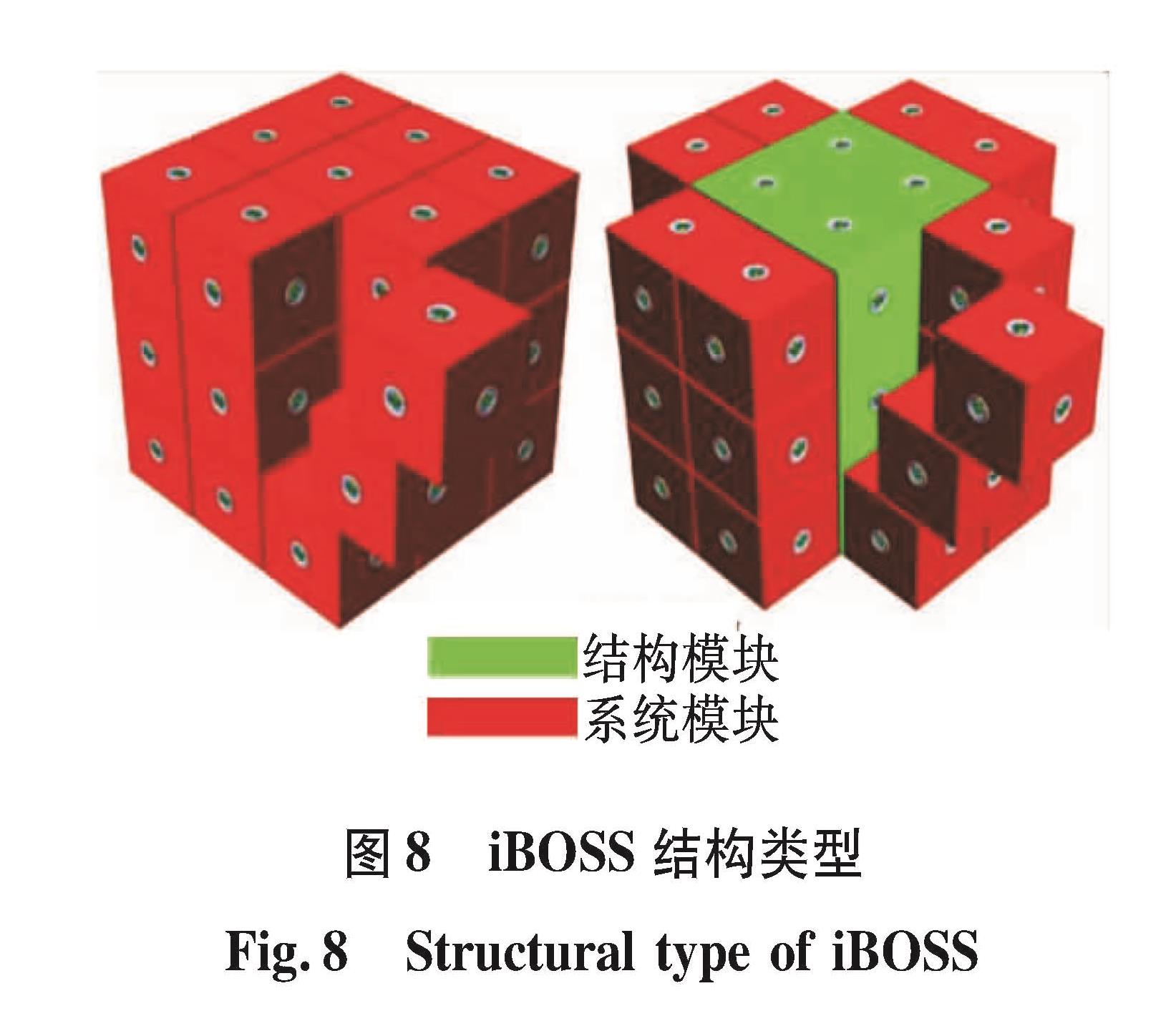
为了更好地发展航天器的模块化装配和在轨维修更换,德国亚琛工业大学、柏林工业大学等联合开发了智能在轨卫星服务模块(intelligent building blocks for on-orbit satellite servicing, iBOSS)[29],iBOSS有两种结构类型,一种是系统模块彼此排列,独立在其他模块外,另一种是结构模块承载,系统模块分布在其周围,如图8所示[29]。
图8 iBOSS结构类型
Fig.8 Structural type of iBOSS
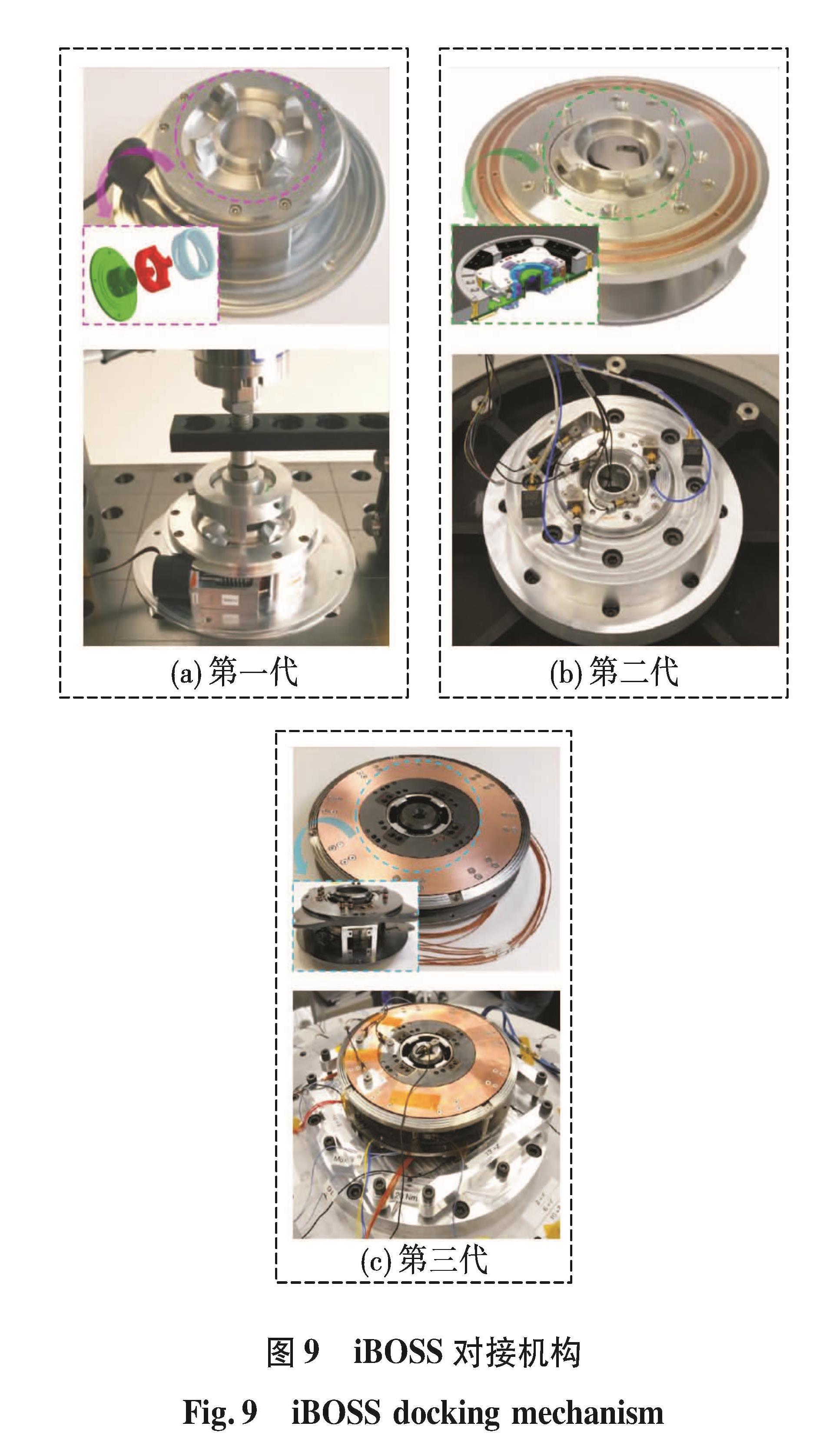
经过技术改进,iBOSS更新了3次:第一代采用空间凸轮和卡扣结构实现对接锁紧[30],无导向机构,要求对接精度高,如图9(a)所示。
图9 iBOSS对接机构
Fig.9 iBOSS docking mechanism
第二代改进了空间凸轮和卡扣结构,增加了导向机构(主被动单元对接面各有4根导向杆),对接面嵌入电力传输环[31-32],如图9(b)所示; 第三代主要改变了电力传输的方式,取消了对接面上的电力传输环,将电力传输装置内置在导向杆,导向杆头作为传输开关[33],主被动单元对接面各有8根导向杆,如图9(c)所示。
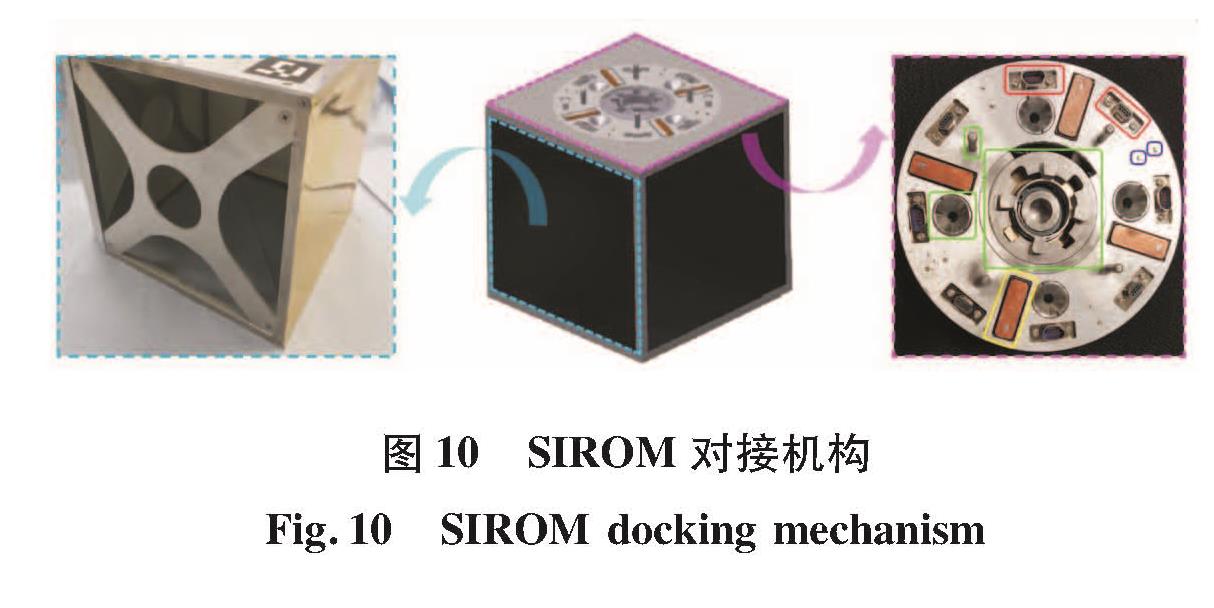
在H2020未来空间任务机器人操纵有效载荷的标准接口(standard interface for robotic manipulation of payloads in future space missions, SIROM)项目中[34],德国不来梅大学联合英国思克莱德大学研发了机电热数一体化的多功能标准接口[35],如图 10所示。SIROM和iBOSS结构和布局相似,对接面含有4根导向杆、4个接纳锥和1个凸轮锁紧机构(见图 10绿色),含有8个数据接口(见图 10红色),含有4个电接口(见图 10黄色),含有4个动力接口(见图 10蓝色)。
图 10 SIROM对接机构
Fig.10 SIROM docking mechanism
在轨道快车计划中,ORU的主被动单元也使用了锥杆式对接机构。ORU由被动接收组件(ORU container assembly, OCA)和主动插入组件(ORU interface assembly, OIA)组成[36],OIA含有2个导向杆A,2个锁紧环B,中心还有一个电连接器C,发射时对接面四周布有定位销E,同理,OCA对接面配置与之对应,如图 11所示[36]。
图 11 OCA和OIA对接机构
Fig.11 OCA and OIA docking mechanism
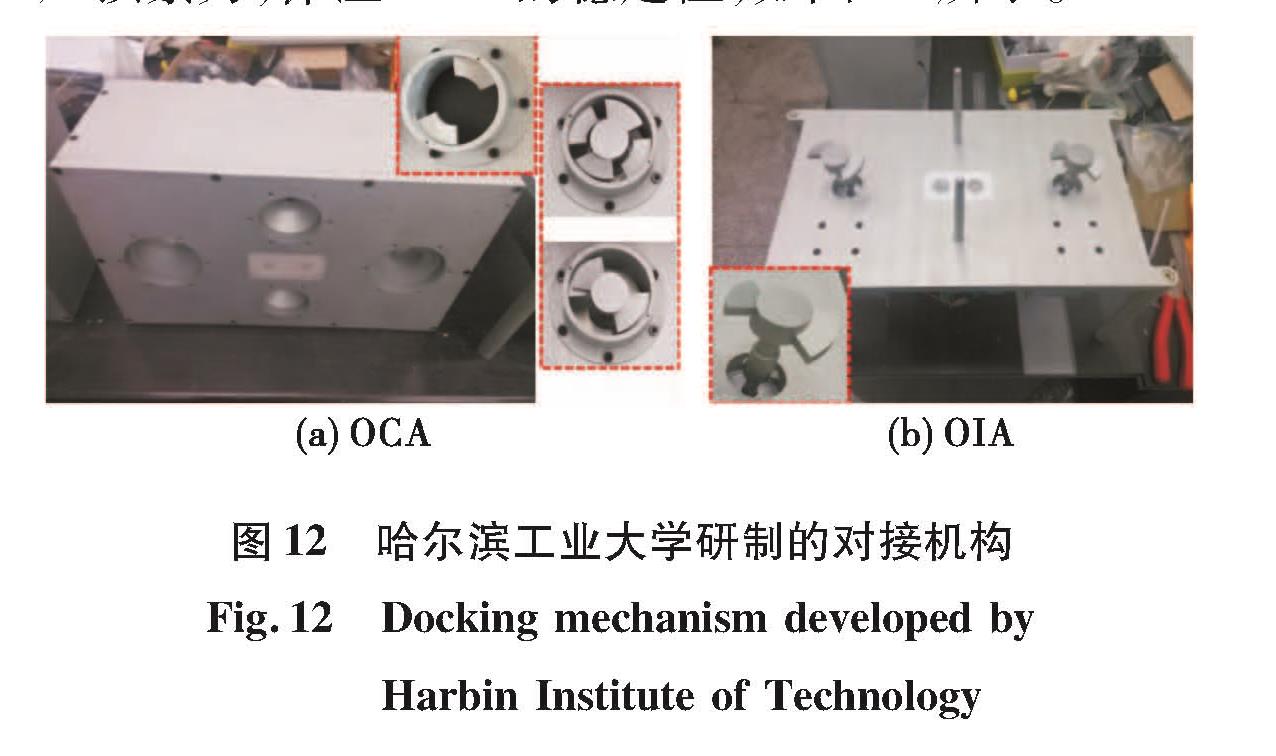
我国对锥杆式对接机构的研究内容鲜有记载,在ORU研制方面也未有在轨实例应用。哈尔滨工业大学对轨道快车计划中ORU进行改进,锁紧机构采用有旋转弧度的叶片[37],对接时,叶片和锁紧孔间存在间隙,不干涉ORU对接,对接后,两者产生挤压预紧力,保证ORU的稳定性,如图 12所示。
图 12 哈尔滨工业大学研制的对接机构
Fig.12 Docking mechanism developed by Harbin Institute of Technology
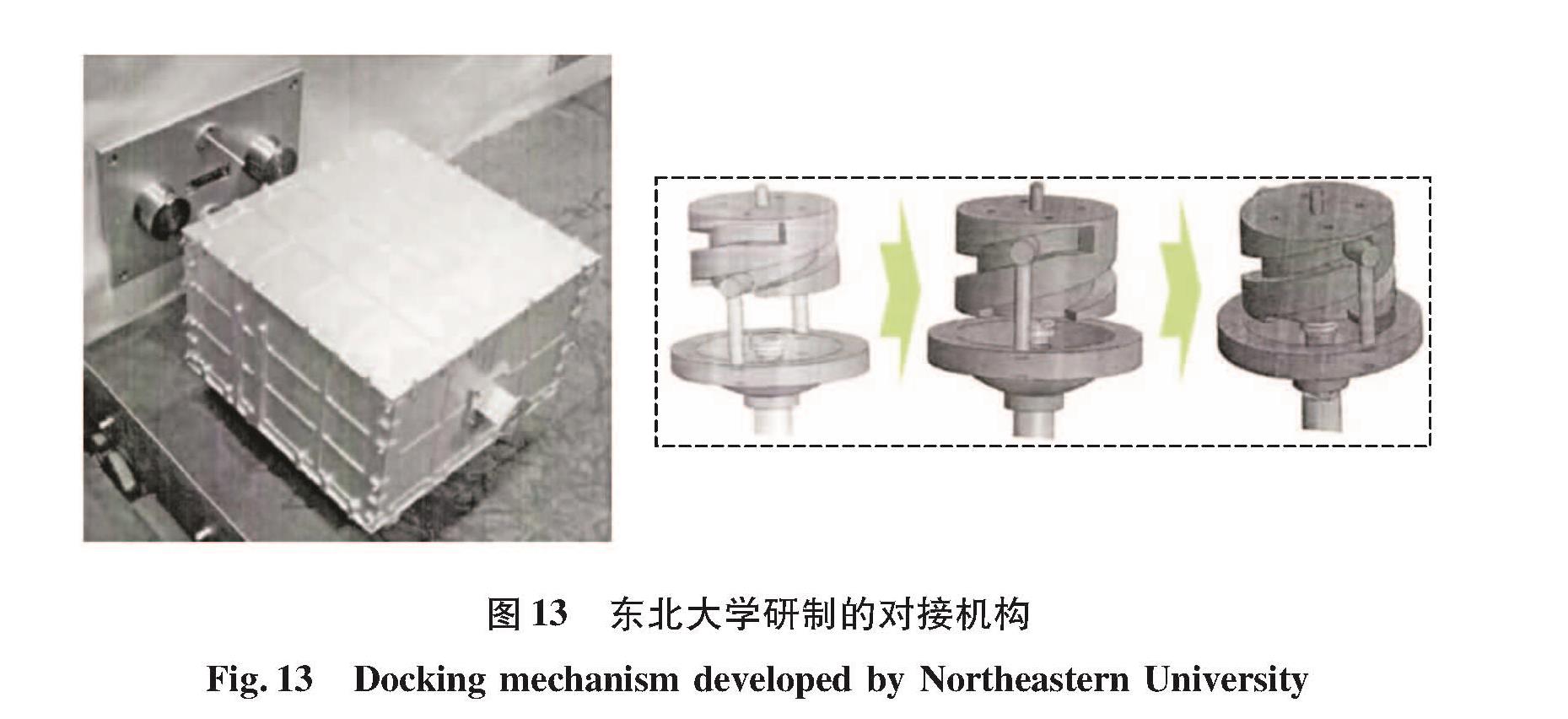
东北大学仍以轨道快车计划中的ORU为设计原型,采用类螺纹原理设计了锁紧机构,如图 13所示。锁紧机构末端配有触点开关,开关触发后电机停转,完成锁紧,对接面有电源与数据的集成接口,减少了器件插拔的次数[38-39]。
图 13 东北大学研制的对接机构
Fig.13 Docking mechanism developed by Northeastern University
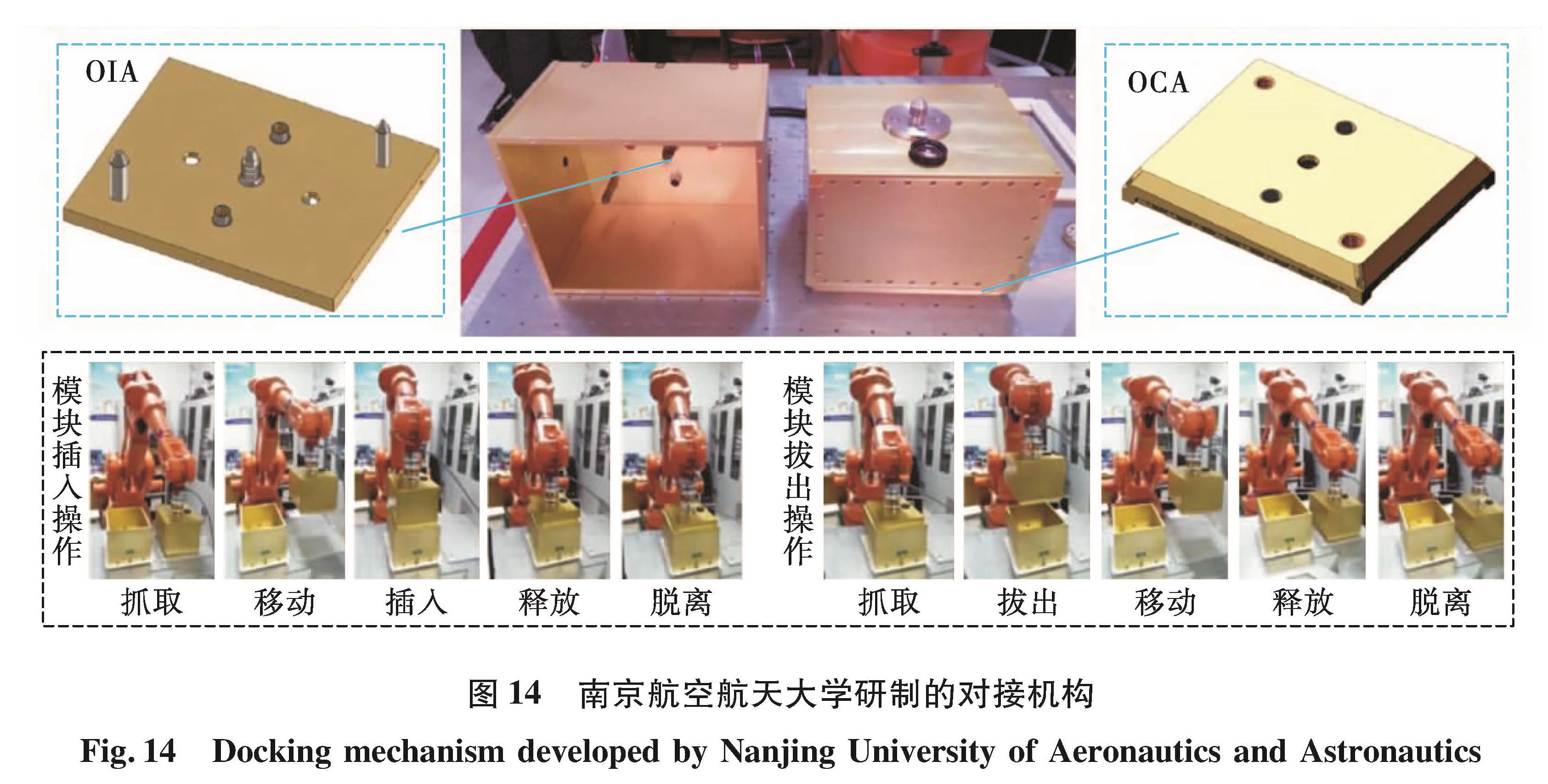
南京航空航天大学摒弃了较为复杂的锁紧机构,锁紧接口为丝杠—螺母机械组合,该组合将旋转运动转化为直线移动[40],为元器件的插接提供动力,螺母位于OCA底板,丝杠位于OIA底板,两根导向杆处于对角位置,如图 14所示。
图 14 南京航空航天大学研制的对接机构
Fig.14 Docking mechanism developed by Nanjing University of Aeronautics and Astronautics