0 引言
近年来,随着人类对太空领域的持续深入探索以及航天技术的不断发展,航天任务的要求越来越高、越来越复杂,进而对运载火箭可靠性和安全性的要求也越来越高[1-2]。
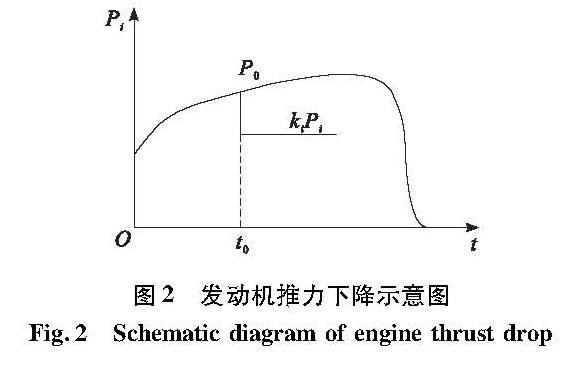
火箭飞行时,其运动可分为质心运动与绕质心运动。其中质心运动是研究火箭在外力作用下的质心平移运动,绕质心运动是指火箭在力矩作用下的转动运动,主要研究火箭的实时姿态变化[3]。当火箭发生推力下降的问题时,火箭将会发生失衡,火箭的控制系统控制能力降低,从而导致火箭偏离正常轨道,无法完成发射任务,严重时甚至导致火箭坠毁。2002年12月11日,“阿里安5ECA”型火箭在飞行过程中由于其芯级发动机出现严重扰动最后不得不执行自毁指令[4]。针对发动机推力损失的问题,许多学者从故障诊断、故障预测的角度展开研究,如马军强等通过建立相关向量机模型,对发动机推理参数进行预测,以做到提前预警[5]。张伟星等利用BP神经网络对火箭增压输送系统进行故障检测,以满足实时检测的需要[6]。
实际上,发动机故障引起的推力损失并不全会造成火箭发射任务的失败。开展火箭建模研究并对故障后火箭的控制力矩进行重构,可以在保证火箭安全的前提下圆满完成发射任务并挽回经济损失,是解决火箭故障的一种有效的手段且具有重要意义[7-8]。控制力矩重构是指在火箭故障时,不改变火箭控制系统的基本控制律,利用控制分配技术进行重新分配执行机构的指令以产生期望的力或者力矩,达到火箭仍能正常飞行的目的[9]。控制分配技术最先在飞行控制设计中被提出,其包含的算法主要有串接链法[10]、最优化方法[11]以及直接分配法[12-13]等,由于其优越性在工程上受到了广泛关注:如Buffington等在研究多操纵面无尾战斗机的控制分配问题时,将其转化为具有约束参数的最优化问题,以最小化作为控制面偏转函数的优化目标进行计算[10]; 杨凌宇等针对新一代多操纵面飞行器的控制分配问题,提出了一种最优控制的基底排序法[14]; 程堂明等在考虑火箭伺服机构卡死故障的研究中,采用联合重分配按比例系数求解的办法,对故障后发动机的控制指令进行了重新分配[15]; 冯昊等对于火箭飞行中发动机组部分模块存在故障的问题,设计了一种控制力矩重构策略,解决了该问题[16]。目前针对火箭推力下降的力矩重构研究相对较少,且现有研究方法存在计算量复杂、迭代累计误差较大等问题。
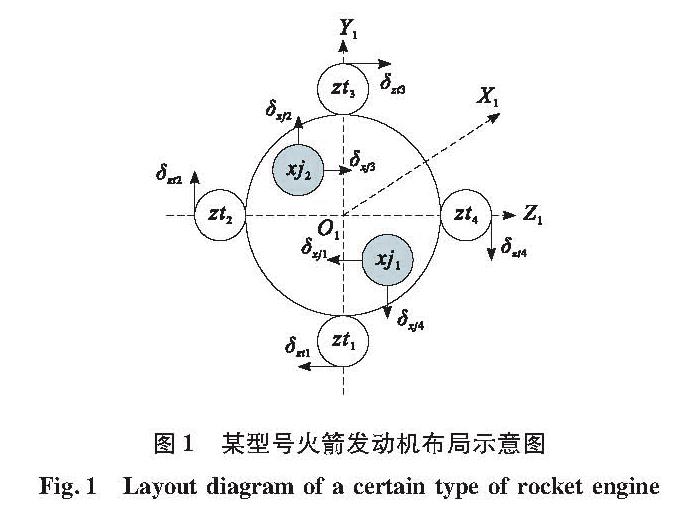
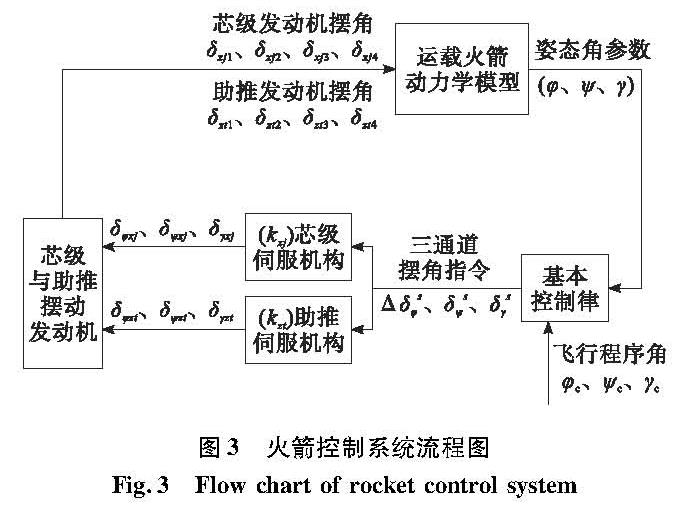
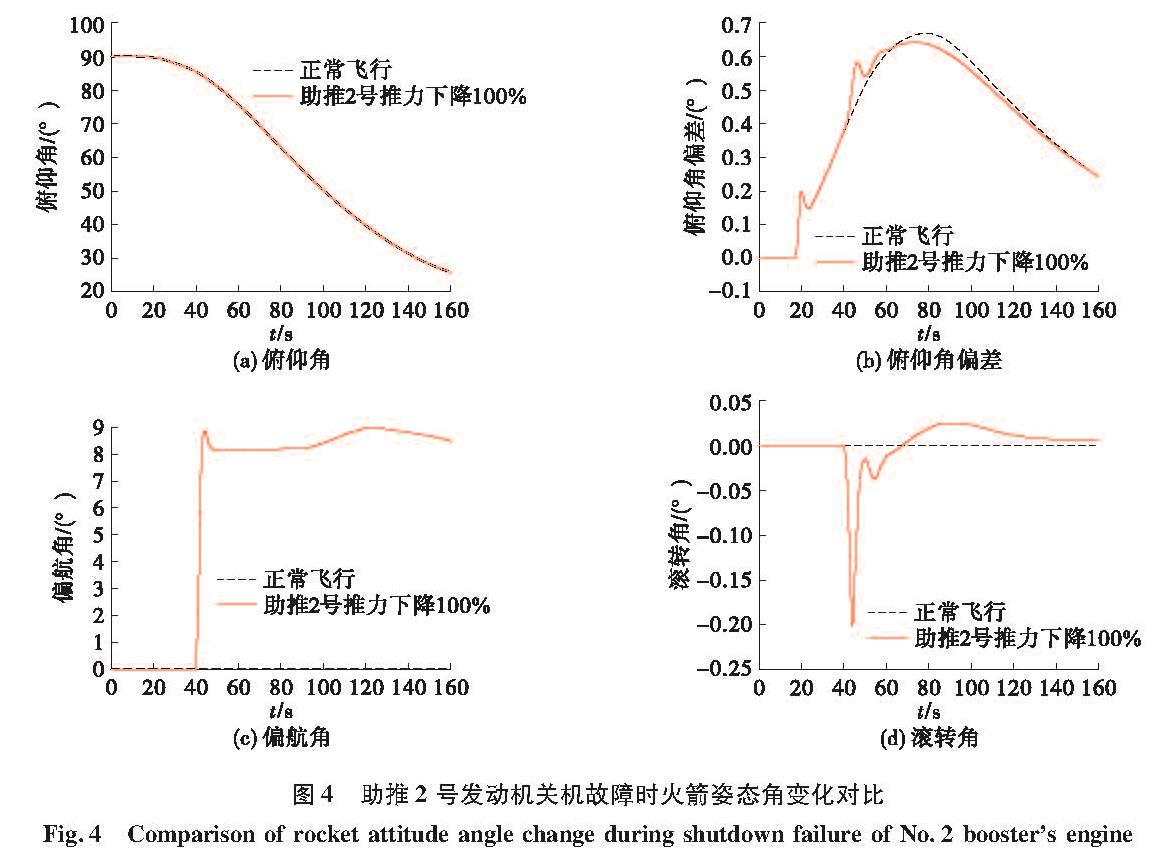
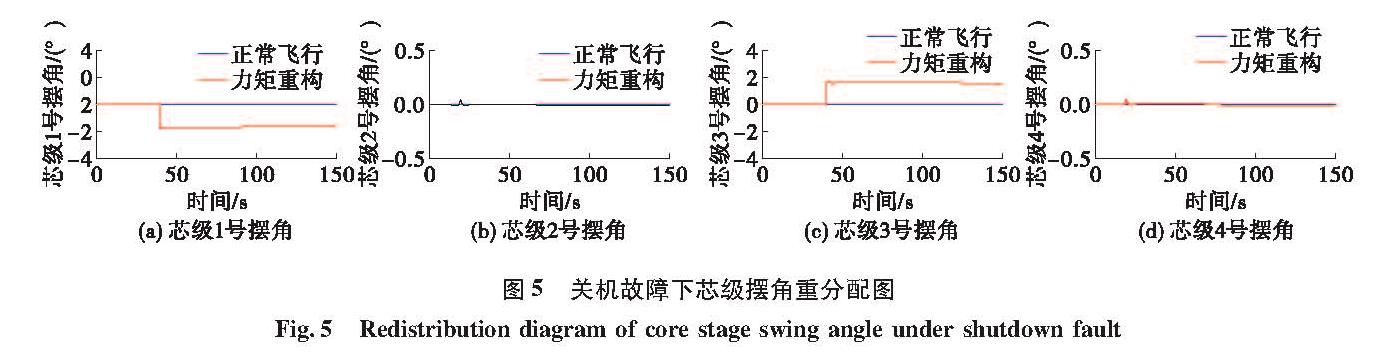
本文以某现役捆绑火箭为例,结合助推火箭与芯级火箭联合摆动控制火箭姿态的特点,提出了一种基于改进单纯形法的控制分配算法,该方法有效改善了多次迭代累计产生的进位误差问题。仿真结果表明,通过利用控制分配技术合理分配摆动发动机的摆角,可以有效地弥补故障后火箭控制系统能力降低的问题,维持火箭姿态的稳定。