使用Optistruct进行结构拓扑优化的流程主要包括:初始结构有限元建模、优化模型定义、结构分析和优化计算等。初始有限元建模与常规的有限元建模方法相同。拓扑优化的关键是定义3类设计要素:优化目标、约束条件和设计变量,对结构动力学优化,优化目标和约束条件涉及固有频率、振型、稳态响应以及随机振动响应等,设计变量为单元密度。结构分析的类型根据实际情况,可以是单独的静力、动力学分析工况,也可以是多个工况组合分析。
Optistruct拓扑优化采用变密度法的SIMP(solid isotropic microstructures with penalization)计算模型,单元密度在0~1之间连续变化,优化后单元密度为1表示该处材料优先保留,单元密度为0表示该处材料可去除。单元的密度与材料密度有关,因此也与结构刚度有关,而单元密度处于0~1之间的材料存留不明确,造成优化结果不清晰。Optistruct使用惩罚因子技术使单元的密度向0或者1聚集,该技术被称作“power law representation of elasticity properties”,对实体单元其表达式为[17]
K-(ρ)=ρpK'(1)
式中:K-和K'分别为惩罚后的单元刚度矩阵和实际的单元刚度矩阵; ρ为密度; p为惩罚因子,取值大于1。
1.1 拓扑优化模型
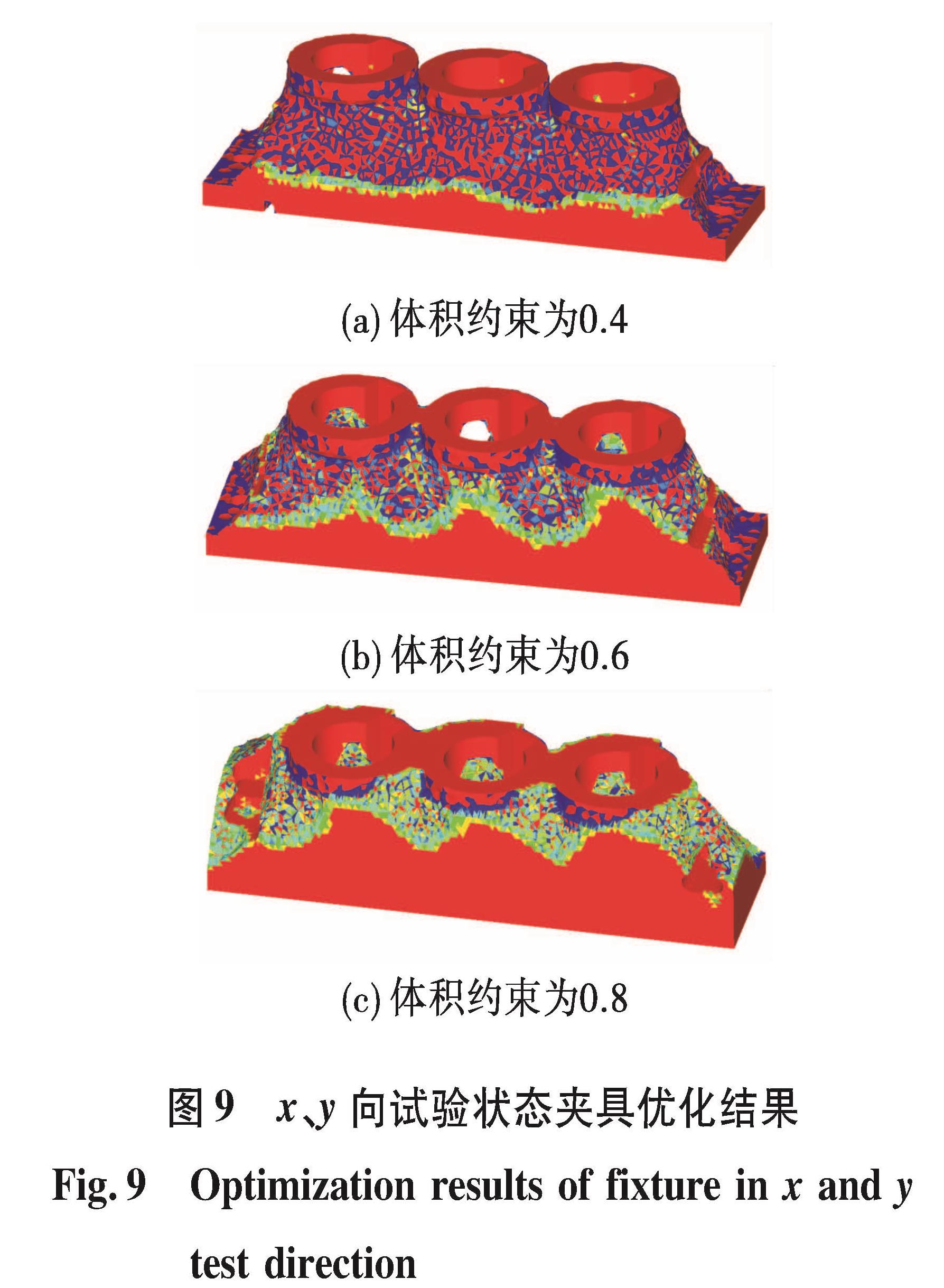
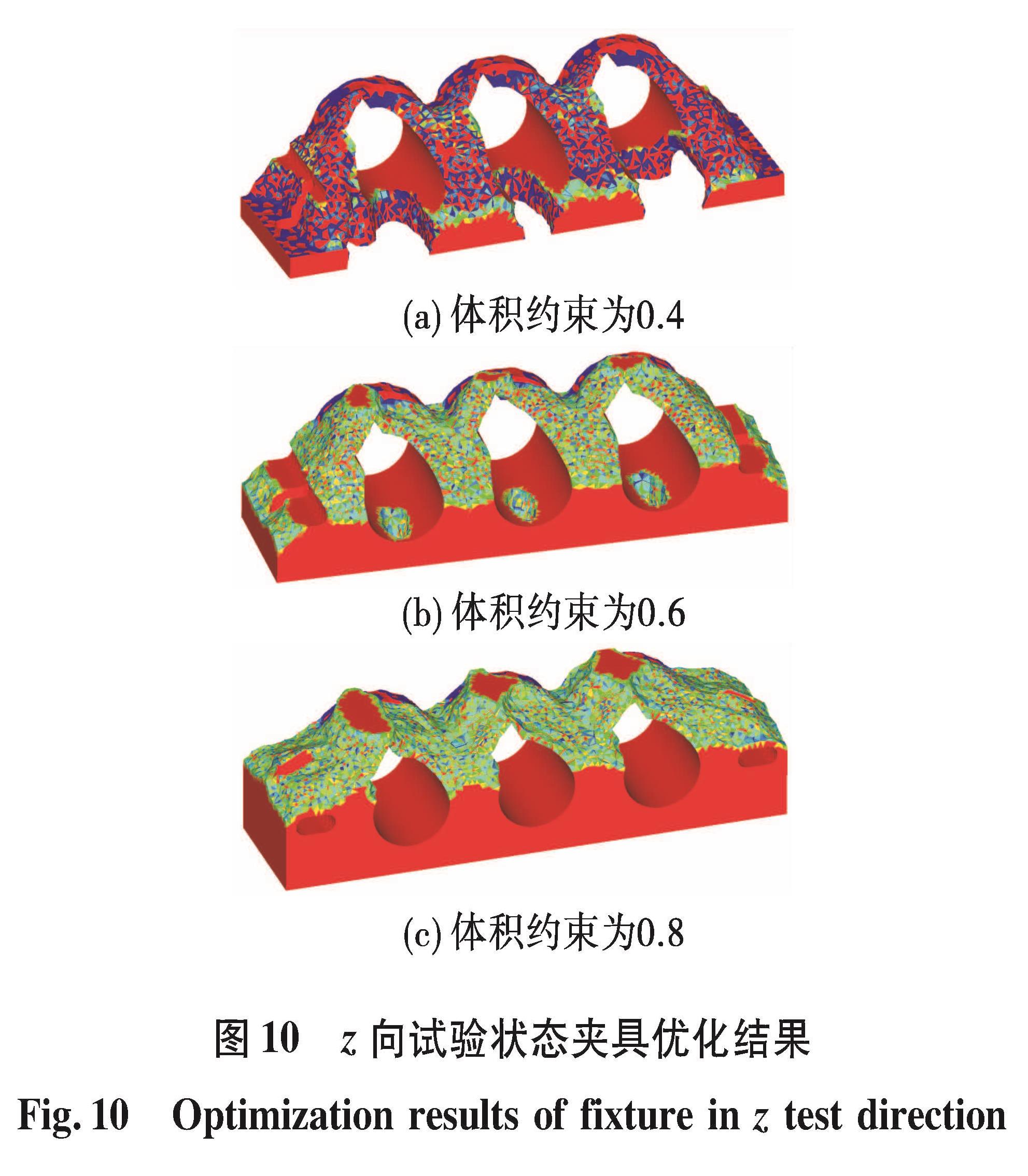
夹具的动力学拓扑优化是在给定体积或质量占比的约束条件下,通过改变单元密度,使初始结构的材料在设计域上重新分布,从而达到结构的固有频率或动力学响应最优的目的。以固有频率最大优化为例,结构的动力学特征方程为
(K-ω2iM)Φi=0(2)
式中:K和M分别为系统的刚度矩阵和质量矩阵; ωi和Φi分别为系统第i阶固有频率和振型向量。拓扑优化的数学模型可以表述为
式中:ωi为优化的目标频率; ρj为单元密度; ρmax和ρmin为密度的优化上下限; V为优化后的体积; Vo为初始体积; fV为体积约束的百分比。
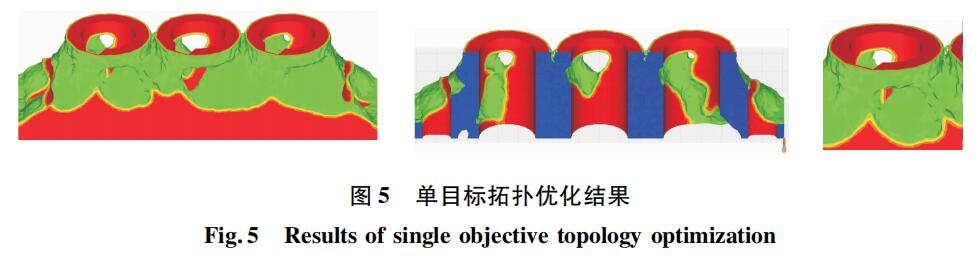
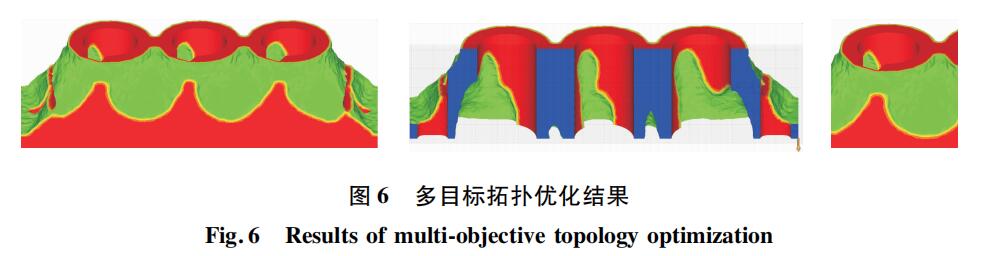
单独以固有频率最大为优化目标进行动力学拓扑优化时,很容易陷入局部最优区域,造成拓扑优化结果不清晰、拓扑结构刚度差、与实际承载不符的问题[18]。根据文献[10,14,16,18-21],可以采取固有频率与静态响应或动态响应与静态响应综合的多目标或多约束的方法提高优化结果的可行性。几种常用的多目标优化方法包括:①固有频率与静力响应综合的多目标优化; ②动力学响应与静力响应相结合的多目标优化; ③低频段与高频段动力学响应相结合的多目标优化。
Optistruct软件中可直接实现第①类的多目标优化,计算时采用一种加权求和法,优化模型可简单表述为
min[wcC(ρ)+wλ/λ(ρ)](4)
加权求和法优化模型形式简洁,计算效率高。多目标优化时,固有频率与静力响应(如刚度、柔度或者应变能)的数量级差异较大,加权系数的取值对优化结果有影响。Optistruct允许程序自动设置加权系数,根据初始迭代步计算应变能数值C0和模态特征值λ0,得到固有频率加权系数wcC0/λ0,使固有频率和静应变能加权后的响应处于同一数量级。需要注意的是,静应变能(compliance)默认定义在整个结构上,其计算公式为
C=1/2uTKu=1/2∫εTσdV(5)
目前,一种普遍的多目标优化策略为折衷规划法(compromise programming method),以固有频率最大与静应变能最小的多目标拓扑优化为例,采用折衷规划法[14]创建目标函数,其表达式为
式中:C(ρ)为结构在静载荷工况下的柔度; ω(ρ)为结构的固有频率; Cmax和Cmin分别为静应变能目标函数的优化上下限; ωmax和ωmin分别为固有频率目标函数的优化上下限; w1和w2分别为静应变能和固有频率占优化目标权重系数; q为惩罚因子,取值不小于2。Cmax、Cmin和ωmax、ωmin分别通过单目标静应变能和固有频率优化前后的结果获得; 权重系数根据经验给出,也可以参考决策论中的层次分析方法确定[16]。
1.2 优化控制参数
Optistruct进行拓扑优化时,需要对离散度参数、最小成员/最大成员尺寸、“棋盘格”控制等参数进行设置,使得拓扑优化后的结构更加合理[21]。主要参数设置如下。
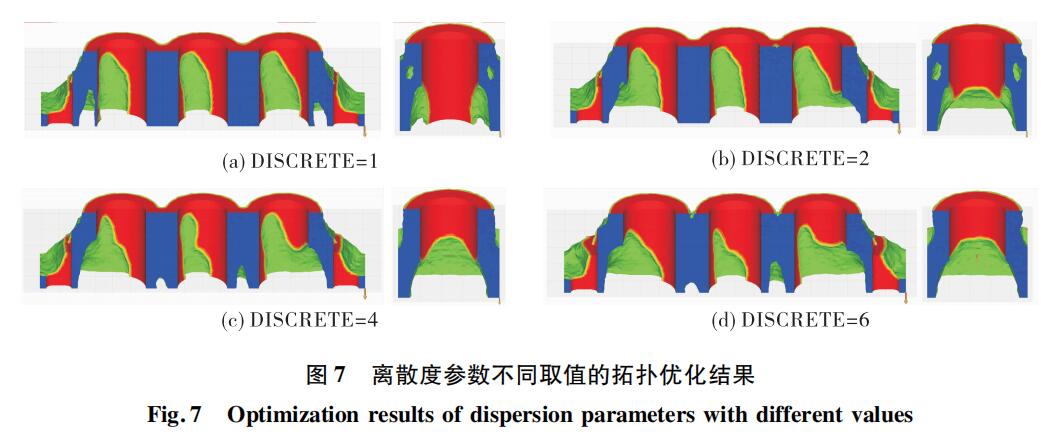
1)DISCRETE,即离散度参数,用于对惩罚函数进行控制,该值越高,材料密度介于0~1之间的单元就越少,拓扑优化的结构更加清晰。对于实体单元,参数值一般不小于2。图1给出了离散度参数取不同值的拓扑优化后结构截面形状,可以看出,离散度越高,材料的无效堆积越少。
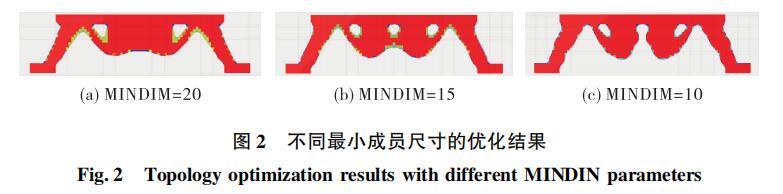
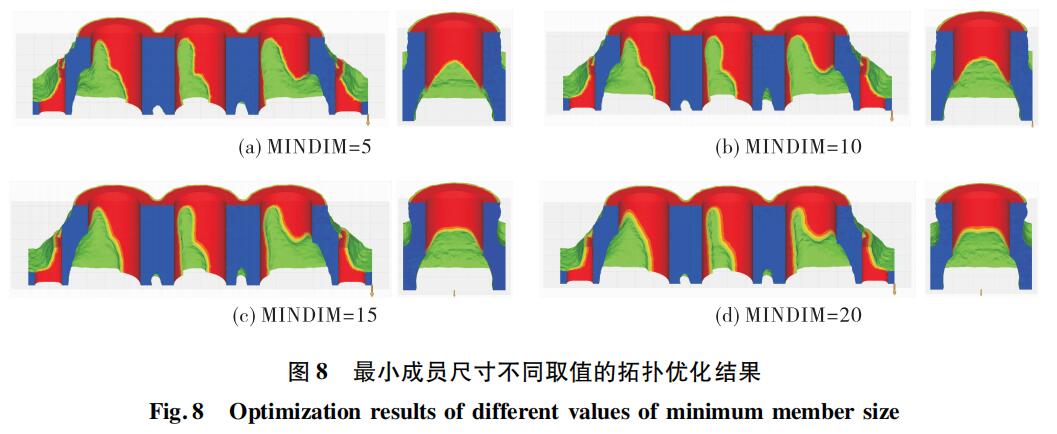
2)MINDIM和MAXDIM,即最小成员尺寸和最大成员尺寸。最小成员尺寸主要用于消除细小的网状结构,有更好的加工性(见图2)。最大成员尺寸用于限制材料的过渡堆积,使结构更加清晰。通常最小成员尺寸大于单元尺寸的2~3倍,最大成员尺寸默认为最小成员尺寸的2倍左右。
图1 不同离散度参数的拓扑优化结果
Fig.1 Topology optimization results with different DISCRETE parameters
图2 不同最小成员尺寸的优化结果
Fig.2 Topology optimization results with different MINDIN parameters
3)CHECKER,即“棋盘格”控制。“棋盘格”现象是优化过程中不同密度单元呈现交替排列的现象,0表示无控制,1表示有控制。图3给出了无“棋盘格”控制和有“棋盘格”控制的拓扑优化结果,显然,采取“棋盘格”控制后,拓扑优化的单元密度分布更加连续,过渡更加均匀。文中“棋盘格”控制均设置为1。
图3 “棋盘格”参数设置对拓扑优化结果的影响
Fig.3 Influence of CHECKER parameter settings on topology optimization results
另外,拓扑优化中还可以设定与加工制造有关的工艺参数,包括对称约束、拔模约束等。