2.1 3D-SLDV
在离心轮后盖板上内外两圈各粘贴16个反光片,共布置32个测点,如图2所示。
图2 基于3D-SLDV的离心轮测试现场
Fig.2 Test photos of the impeller based on 3D-SLDV
测试采用Polytec PSV-400-3D激光测振仪进行,该激光测振仪可以获得特定频率下工作变形(operational deflection shape, ODS),对于非密集频率得到的结构工作变形可以认为是该阶模态。通过移动机械臂调整激光扫描头的位置,使得激光扫描头正对离心轮。采用力锤(型号:B&K8206)敲击离心轮后盖板外缘提供脉冲激励,使用金属锤头以获得高激励频率带宽。力锤每敲击一次,3台激光测振仪同时采集某一测点的时域响应数据,每个测点敲击5次进行幅值平均,以提高信噪比。该测点采集完成后,扫描点自动跳到下一测点,重复测量过程直到所有测点完成采集。分析频率带宽为0~6.4 kHz,谱线数为6 400,频率分辨率为1 Hz。
2.2 3D-DIC
3D-DIC测试时采用与3D-SLDV测试时相同的安装方式。在离心轮表面制作高对比度黑白散斑,使用高速DIC重复试验,试验现场如图3所示。采用两台高速相机拍摄力锤敲击下离心轮的动态响应,该相机在1 280×896分辨率下最高帧速率达65 000 帧/s。试验过程中采用85 mm定焦镜头拍摄,曝光时间5 μs,帧速率30 000 帧/s以捕捉关心的离心轮模态,两台无频闪补光灯从不同方向照射离心轮,解决高速拍摄时曝光时间短进光量不足的问题。力锤敲击时同步触发高速图像采集系统记录离心轮的振动响应,采集1 s时长数据,两台相机各拍摄30 000张图像。
图3 基于高速3D-DIC的离心轮测试现场
Fig.3 Photos of impeller testing based on high-speed 3D-DIC
拍摄完成后,通过千兆网线将相机内存中图像下载到计算机硬盘,采用VIC-3D软件执行相关性计算,如图4所示。子集大小为29,步长为7,位移计算完成后利用FFT模块进行离心轮全场模态分析。
图4 3D-DIC计算的子集
Fig.4 Subset of 3D-DIC calculations
2.3 3D-SLDV和3D-DIC对比
从测试过程来看,3D-SLDV测试相当耗费人力,由于一般激振器无法提供5 kHz以上的激励,本次离心轮激励采用力锤敲击。每一个测量点都需要5个谱平均值,32个测点需要试验人员至少敲击160次离心轮。每个点单次激励的准备和采样时长约为12 s,每个点顺序获取数据的过程大约需要32 min。然而,与获取数据所需的时间相比,3D-SLDV技术的处理时间相对较短,在不到1 min的时间内完成工作变形计算。对于3D-DIC测试,获取数据的时间非常短,只需要采集1 s的响应数据,力锤只需敲击一次,产生60 000张图像共64 GB数据,但数据的传输和分析耗时较长,从高速相机内存下载到计算机用时12 min,而对30 000张图像进行相关性计算大约花费3.4 h,高速DIC的处理时间是使该方法失去效率的重要环节。
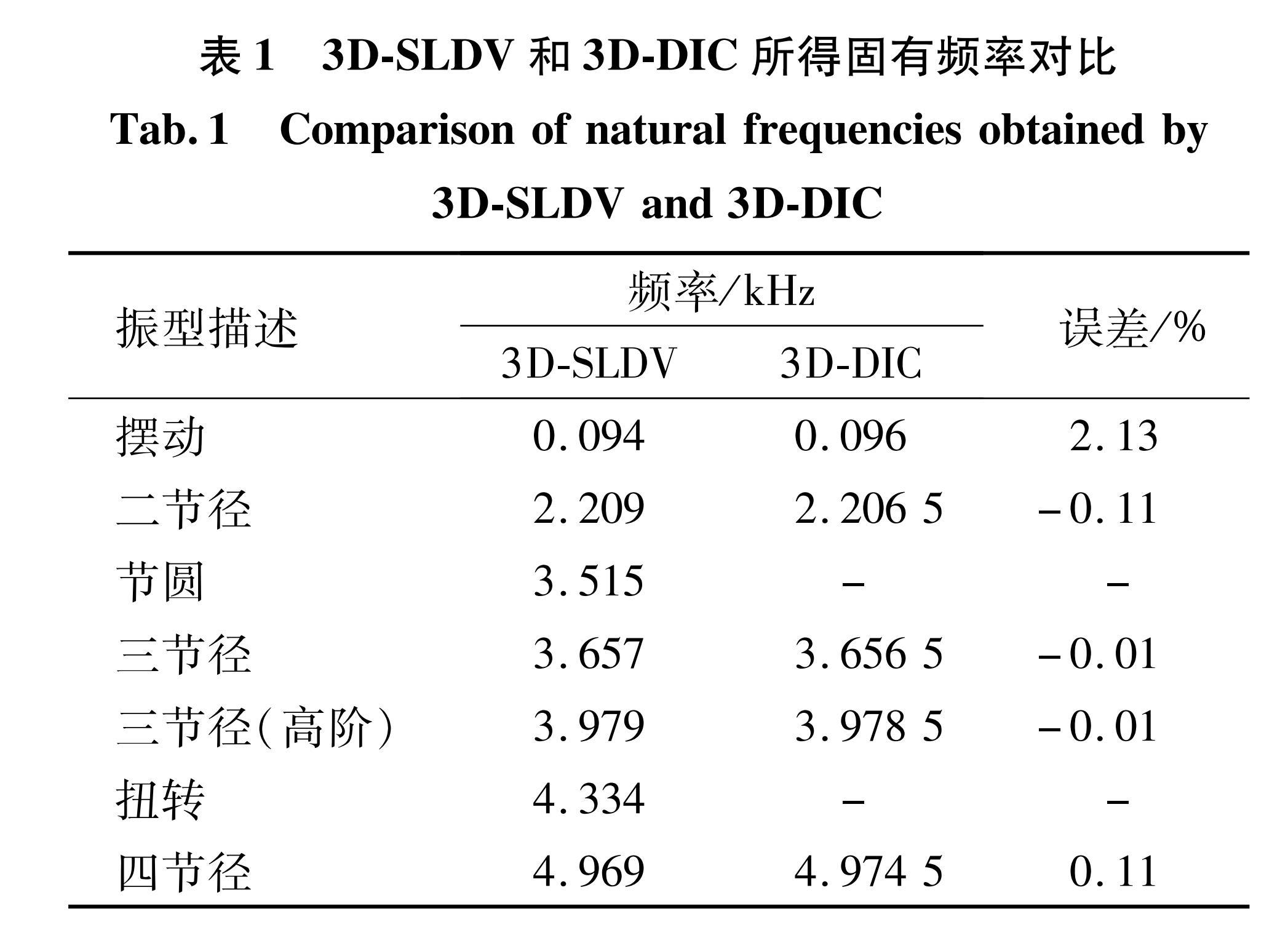
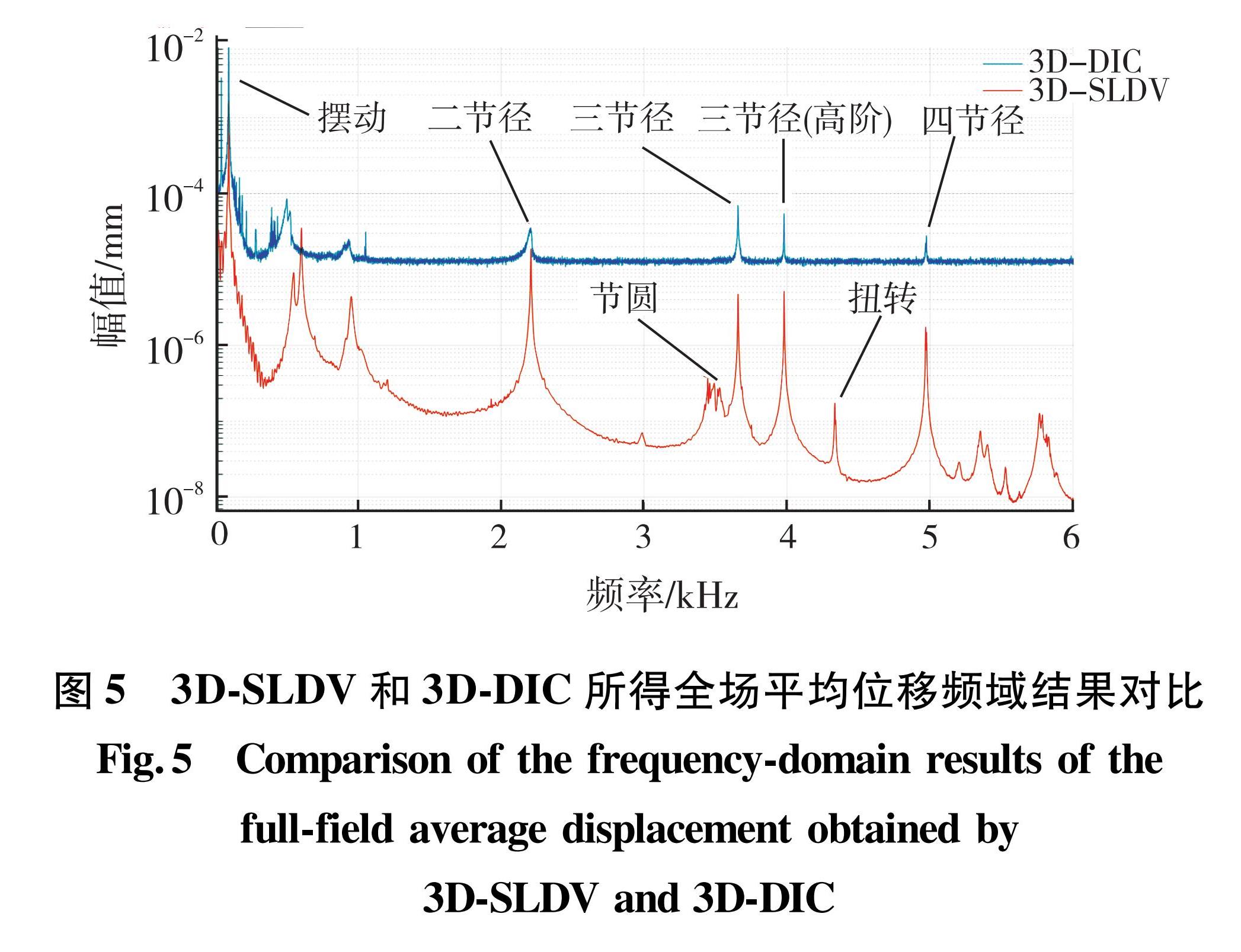
从测试结果来看,图5给出了3D-SLDV和3D-DIC两种方法所得全场平均位移的频域结果对比,表1给出了两种方法所得固有频率的结果对比。
表1 3D-SLDV和3D-DIC所得固有频率对比
Tab.1 Comparison of natural frequencies obtained by 3D-SLDV and 3D-DIC
其中1 kHz以下的频率与离心轮安装状态有关,两次测量1 kHz内的频率差异是由于两次安装的拧紧力矩不同,重点关注1 kHz以上的离心轮自身的节圆和节径振型,两种方法得到的固有频率差别最大仅为0.11%。
图5 3D-SLDV和3D-DIC所得全场平均位移频域结果对比
Fig.5 Comparison of the frequency-domain results of the full-field average displacement obtained by 3D-SLDV and 3D-DIC
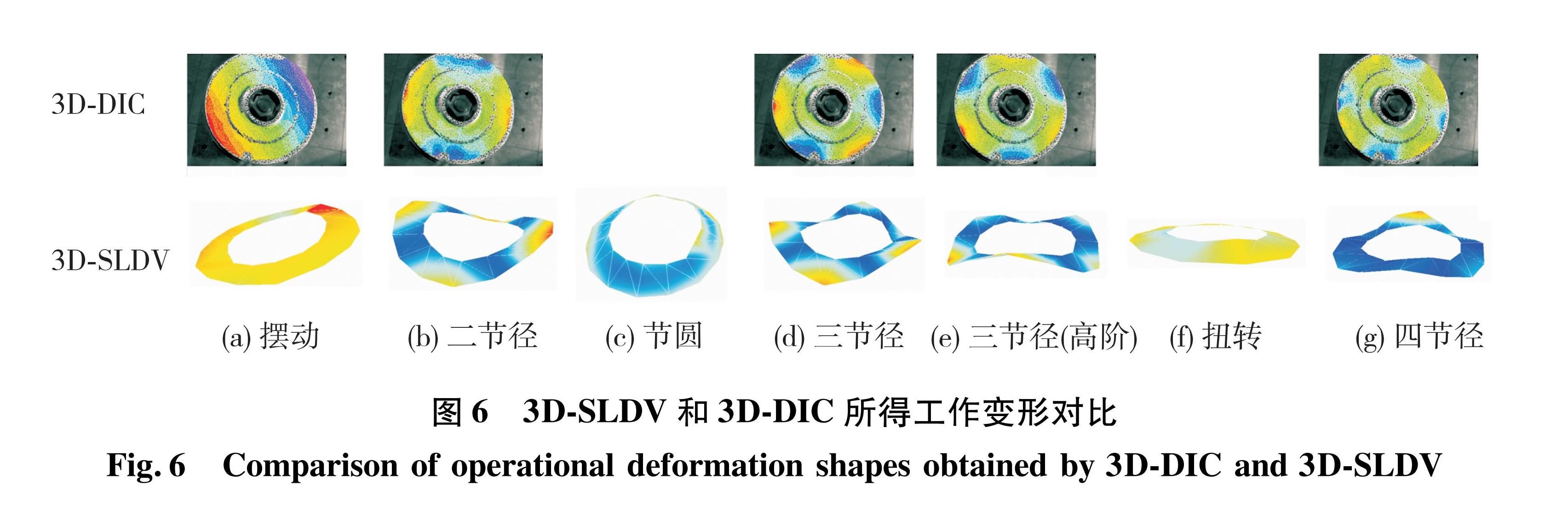
在1~5 kHz频率范围内3D-SLDV技术共捕捉到6阶振型,而3D-DIC技术捕捉到4阶振型,如图6
所示。从图5中可以看出,DIC技术是基于位移的测试技术,本次实验关注的离心轮节圆和节径振型均是离面振型,3D-DIC技术存在明显的本底噪声,对于本次测试,相机分辨率为1 280×896,相机镜头距离离心轮约为0.65 m,相机视野为420 mm×265 mm,相机夹角为29.22°,可以捕捉的最小位移为12.5 nm,在图5中表现为一条水平线,DIC系统无法识别低于该位移的高阶振型。相比较而言,3D-SLDV技术可以识别的最小位移量级小于6.5 pm,对于节圆和扭转两阶振型的响应幅值由于小于DIC系统的本底噪声而无法被DIC系统捕获。从振型的精细程度来看,3D-SLDV技术的32个测点对于识别四节径振型显然是勉强的,更高频率的振型由于测点数量不足而无法辨识,因此本文未分析5 kHz以上的振型。当然可以通过布置更多的反光测点获得更加精细的振型,但这会进一步增加测试时间和人力成本。相比较而言,3D-DIC捕捉到了振动结构的局部变化,其细节程度是3D-SLDV技术难以实现的。
图6 3D-SLDV和3D-DIC所得工作变形对比
Fig.6 Comparison of operational deformation shapes obtained by 3D-DIC and 3D-SLDV
值得注意的是,DIC测量分辨率通常与测量体积成线性关系,如果灵敏度需要增加一个数量级,则测量体积需要减少一个数量级。根据上述测试过程和测试结果,使用DIC方法测量发动机结构振型是很有潜力的,在振动测量中优势如下:①采集时间很短,数据分析可实现自动化,一次可识别多个ODS或频率; ②对刚体运动不敏感,对大位移测量更有优势; ③振型的细节描述非常好,可以同时计算上千个点的位移,可以以纳米级精度测量3D全场高频ODS; ④高速相机价格比3D-SLDV便宜,可同时测量应变。但该方法也有一些局限性:①最高可测频率在很大程度上取决于所使用的相机,且随着帧速率的增加,分辨率会降低; ②随着视场增加,测量的平面外分辨率成比例地降低; ③DIC是一种位移测量技术,因此结构位移必须大于系统的本底噪声。对于高频振动的结构,加速度量级可以很容易地使用加速度传感器测量,高频振动的位移量级可能远低于DIC测量的本底噪声。
实际应用中,3D-SLDV和3D-DIC两种技术均能获得结构全场振型。高分辨率(≥400万像素)高速相机的普及可以进一步提高高速3D-DIC技术的模态测试能力,这种基于图像的测试技术也更容易与运动放大等视觉技术结合,得到良好的结果,但其所耗费的时间使该方法目前仅可用于研究性试验,而非大规模工程应用。