收稿日期:2023- 09- 18 修回日期:2023- 10- 11
基金项目:浙江省重点科技项目(2020R02008)
作者简介:范宇(1993—),男,硕士,工程师,研究领域为航天电磁阀设计、流体仿真。
基金项目:浙江省重点科技项目(2020R02008)
作者简介:范宇(1993—),男,硕士,工程师,研究领域为航天电磁阀设计、流体仿真。
LandSpace Science and Technology Co., Ltd., Beijing 100176, China
anti-peak circuit; solenoid valves; Maxwell software; induced voltage; response time
DOI: 10.3969/j.issn.1672-9374.2024.02.012
电磁阀作为控制流体快速通断的开关在航天领域应用十分广泛,电磁阀的性能优劣直接关系到动力系统是否工作正常,甚至关系到航天器飞行的成败,因此对电磁阀性能提升的研究十分必要,近年来很多学者对电磁阀开、关响应速度及电磁力进行了研究。
文献[1-5]利用Maxwell软件仿真研究了弹簧初始安装力、弹簧刚度、弹簧结构、隔磁垫片厚度、工作气隙、驱动电压等参数对电磁阀性能的影响,提出了电磁阀优化的方向。Zhang等[6]利用Simulink仿真和试验相结合的方法对一款两位三通电磁阀进行了研究,得出电磁阀的响应特性与动作频率无关,且打开响应时间随着进口压力增大而减小,关闭响应时间随着进口压力增大而增大的结论。
除了对机械结构的研究,部分专家还对电磁阀线圈和控制电路进行了研究。邹嘉等[7]利用AMESim软件对比分析了电阻和电容对线圈电流和响应时间的影响,实现了电磁阀快速响应的目标。宋会玲等[8]通过给直动电磁阀增加加速启动线圈,研制出打开响应时间为2.8 ms、关闭时间小于2 ms的快速响应电磁阀。宋军等[9]使用MATLAB软件对PWM驱动的高速电磁阀进行了仿真研究,得到了PWM驱动方式的特性,证明了利用PWM驱动可以在降低电磁阀打开响应时间的同时降低关闭响应时间,为优化电磁阀的响应特性提供了一个方案。文献[10-11]研究了在保护电路中增加稳压二极管后的感性元件性能,得出了稳压二极管相对于释放电阻来说同时具有降低反峰电压和加快电流释放的作用。
已有文献主要是从电磁阀本身的结构、线圈、材料、使用工况等方面研究了提升电磁阀自身性能的方法[12-19],但在某些情况下从自身角度很难再进一步提高电磁阀的性能,因此,亟需寻找一种从外部提高电磁阀性能的方法。
电磁阀是一种感性元器件,尤其在断电时会产生一个较大的感应电动势,可能会对继电器等元器件造成损伤[10,20],因此往往需要在整个电路中并联一个消反峰电路来消除电磁阀感应电动势的影响。而消反峰电路对电磁阀的关闭有阻碍的作用,会减缓阀门关闭速度,因此研究消反峰电路对电磁阀性能产生的影响非常必要。
本文基于Maxwell软件,对某型航天姿控电磁阀及其消反峰电路进行了仿真研究,同时对比实测结果,证明仿真模型的有效性,为电磁铁的辅助设计提供一种方法。更进一步地,通过模拟不同消峰电阻下电磁阀的响应时间以及感应电动势,得到更优化的电磁阀控制系统,为电磁阀控制系统的优化提供参考。
本文研究的电磁阀结构如图1所示,是一种典型的轴流直动式电磁阀,主要由阀体、电磁铁外壳、弹簧、线圈、阀芯和阀座等组成。此种构型的阀是常闭式菌阀,断电状态下弹簧将阀芯压在阀座上起到密封的作用,通电后依靠逐渐增大的电磁力克服弹簧力,将阀芯从阀座上吸起,阀门打开,入口和出口相连通。断电后,电磁力逐渐降低,弹簧力又大于电磁力,于是将阀芯压回阀座,从而实现阀门的关闭[21]。
图1 电磁阀结构
Fig.1 The structure of a typical solenoid valve
本文采用Maxwell软件对电磁铁及电路进行仿真模拟,Maxwell软件采用经典的麦克斯韦方程组[22]作为控制方程,包括安培环路定理、法拉第电磁感应定律、高斯电通定理和高斯磁通定律,即
由于二维模型占用资源少且能够较准确地模拟真实电磁场,因此本文采用二维结构来建立模型[23-24]。同时由于电磁铁是轴对称的结构,在建模时仅建立半边模型,采用轴对称模型。在进行瞬态仿真时,需要额外建立一个空气域,用于包裹整个运动件和运动行程,如图2所示。
图2 电磁阀二维结构图
Fig.2 2D structural diagram of a solenoid valve
电磁铁部分所有的磁性材料都选用高饱和软磁合金1J116,线圈材料选用铜,空气域和计算域都设置成真空。边界条件设置为气球边界条件。
将衔铁设置成运动件,行程为0.75 mm,质量为25 g,初始速度为0,阻尼设置为0,加载的力设置为(-26-40-5.54×Position×1 000)N,26 N为弹簧初始安装力,40 N为推进剂介质力,5.54 N/mm为弹簧刚度,因为Position默认单位是m,所以需要乘以1 000换算为mm。
对于静态电磁仿真,需要把绕组的类型设置成电流绞线圈类型。而对于瞬态电磁仿真,为了添加外部电路,在激励的设置上需要把绕组设置成外部绞线圈类型[25],线圈的安匝数设置成1 200。
典型的电磁阀外部电路结构如图3所示[8],主体电路由直流电源、继电器、电磁阀组成,其中电磁阀等效成一个纯电感和一个电阻。继电器由一个单独的电路控制,控制信号采用脉冲电压源。消反峰电路主要由二极管、消峰电阻、电压表等组成,与电磁铁并联连接。本文电磁铁的电阻设置为25 Ω,消峰电阻根据工况不同而调整,直流电源电压设置为27 V,脉冲电压源的脉宽设置为0.1 s,占空比设置为0.5,保证电磁阀经过一个完整的开、关周期。
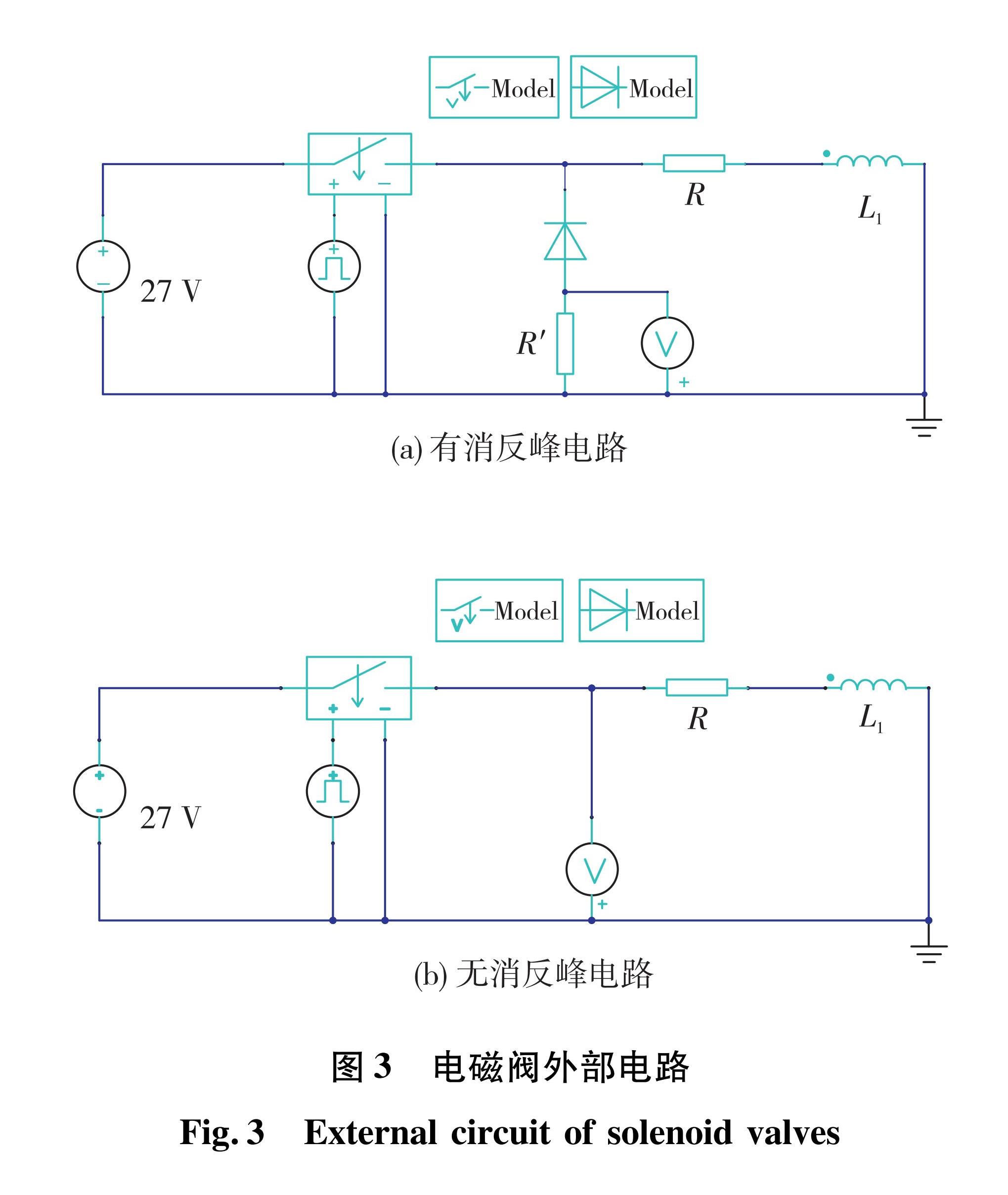
图3 电磁阀外部电路
Fig.3 External circuit of solenoid valves
模型建完后,Maxwell软件会自动划分一套网格,可以采用默认网格,也可根据实际情况调整局部网格的疏密。
求解器设置时,停止时间设置为0.2 s,时间步长设置为0.001 s,这样设置是为了保证采样频率至少达到1 kHz同时又能尽量减少计算的时长。
为了验证仿真模型的准确性,首先在0.75 mm工作气隙下对电磁阀的静磁场进行仿真。计算完成后得到0.75 mm工作气隙下电磁力是137 N,实测值是128 N左右,仿真用的软磁合金B-H曲线和实际有些差异,导致电磁力仿真有些差异。仿真得到的磁力线和磁感应强度如图4所示,符合电磁学基本规律。
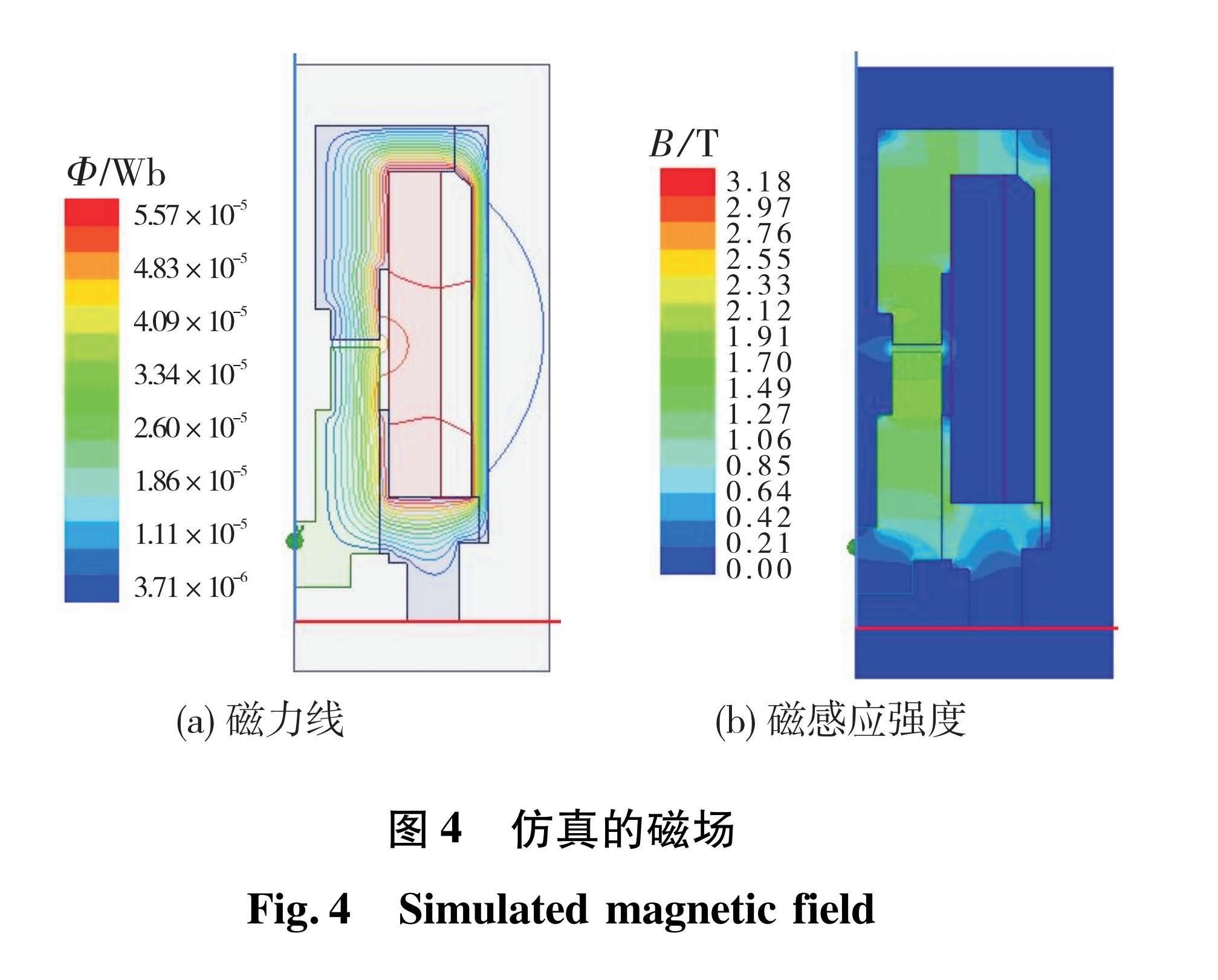
图4 仿真的磁场
Fig.4 Simulated magnetic field
在消峰电阻为20 Ω的状态下,对电磁阀进行了瞬态仿真计算,其他条件的设置如2.4节所述。通过瞬态仿真,得到电磁铁的动态特性,瞬态的电流曲线和阀芯位置曲线见图5,电磁铁产生的反电动势与感应电压(电压表测得)见图6。感应电压测的是消峰电阻两端的电压,反电动势是电磁铁纯电感产生的电动势,如图3(a)所示。对比实测和仿真数据见表1和表2,可以看出仿真的吸合响应时间为18 ms,释放触动时间为41 ms,释放响应时间为44 ms; 实测的吸合响应时间为19.6 ms,释放触动时间为32~40 ms,释放响应时间为36~45 ms。电磁阀关闭后仿真得到的最大感应电压是16.7 V,实测值是16 V。由此可以看出仿真结果和实测数据吻合较好,可以证明仿真模型的合理性。
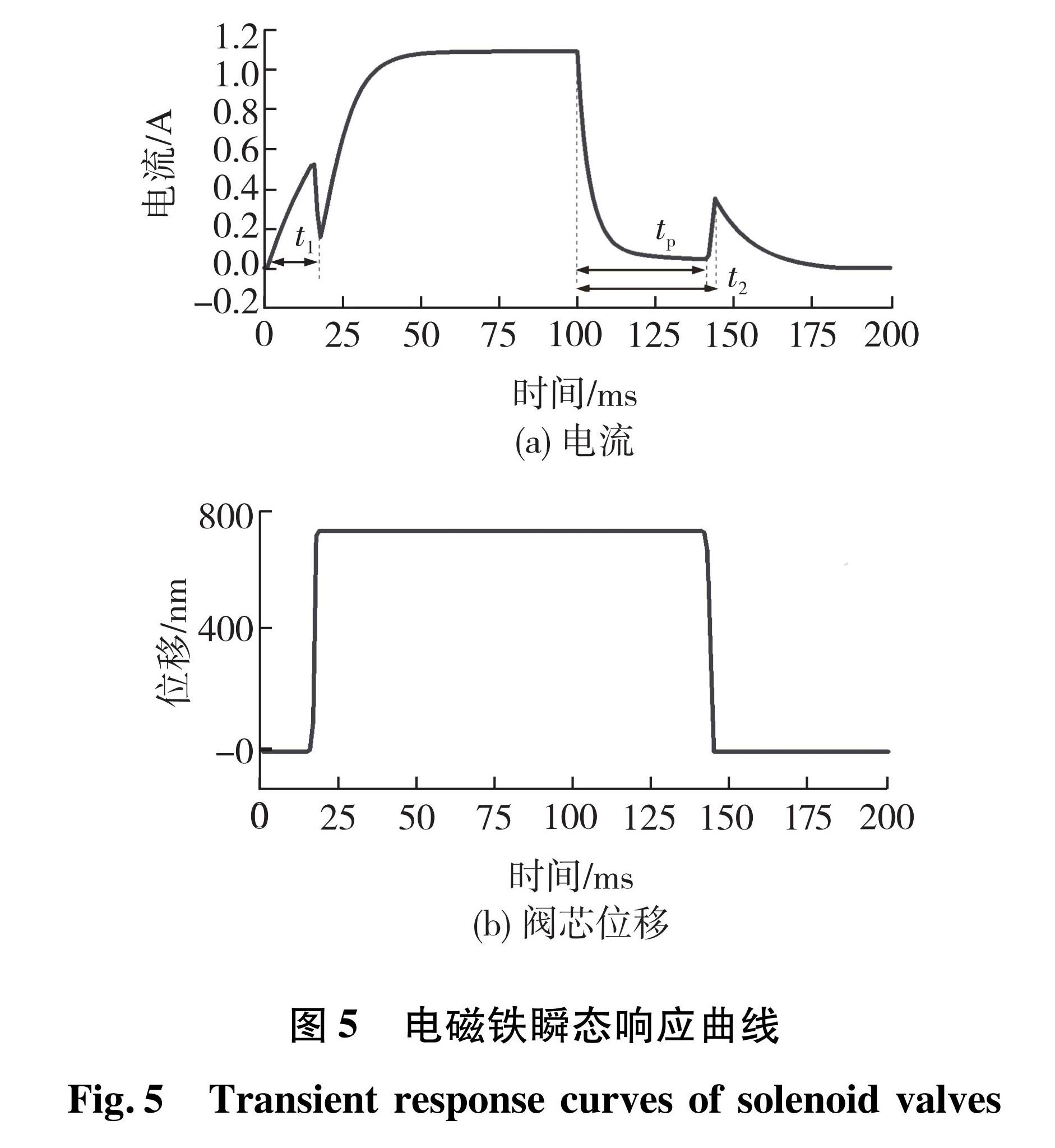
图5 电磁铁瞬态响应曲线
Fig.5 Transient response curves of solenoid valves
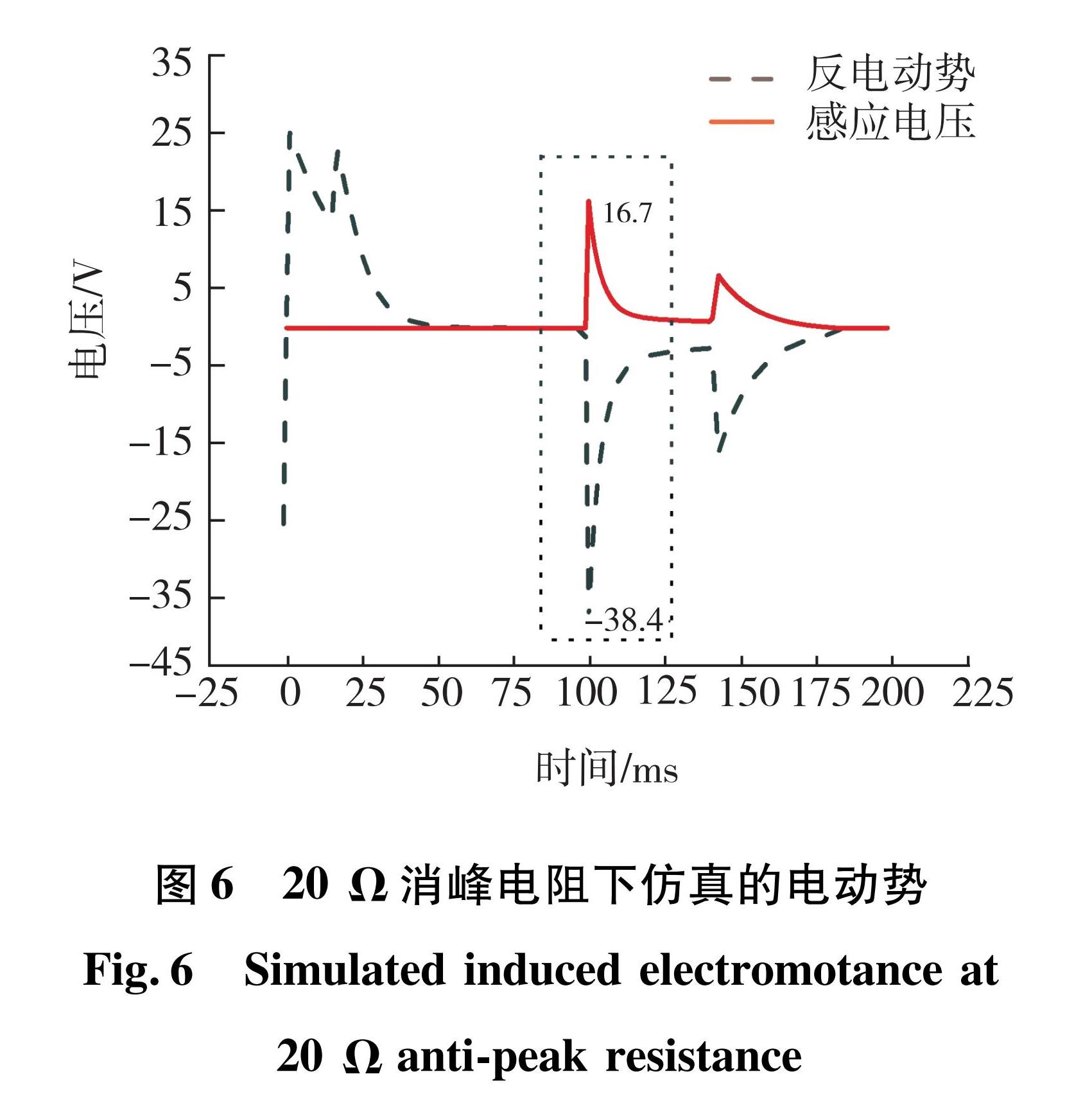
图6 20 Ω消峰电阻下仿真的电动势
Fig.6 Simulated induced electromotance at 20 Ω anti-peak resistance
表1 20 Ω响应时间数据
Tab.1 Response time data at 20 Ω
表2 20 Ω感应电动势数据
Tab.2 Induced electromotance at 20 Ω
本文采用的消反峰电路如图3(a)所示,主要由一个消峰电阻和一个二极管组成,与电磁阀并联连接。通电状态下,由于二极管的单向导通性能,电流只会通过电磁阀一路。断电后,由于电磁阀电感的存在,电磁阀两端会产生感应电动势来抵抗磁通量的减少,于是在由电磁阀、二极管和消峰电阻组成的回路中就会产生感应电流。由于电感元件电流不能发生突变,因此在断电瞬间前后电流是相等的。基于电流不变原理和电磁感应定律可以得到[7,9-10]

式中:L为电磁铁电感; i1为断电前电流; R'为消峰电阻; R为线圈电阻。
式(2)忽略二极管的电阻,则此方程主要由前后两项组成,前一项是电感产生的电动势,后一项是电路中电阻的分压,两项相加为0。式(2)用于后续分析消反峰电路对电磁阀的影响。
为了获得消峰电阻对电磁阀响应时间的影响,利用Maxwell软件对不同消峰电阻(0、20、30、40、50、60、70、100 Ω)下的电磁阀系统进行仿真,得到在不同消峰电阻下电磁阀的电流曲线如图7所示,对应的吸合响应时间、释放触动时间和释放响应时间见表3。
图7 不同消反峰电路下的电流曲线
Fig.7 Current curves at different anti-peak circuits
表3 不同消反峰电路下响应时间统计
Tab.3 Response time at different anti-peak circuits
从图7中可以看出,消反峰电路对于电磁阀的吸合响应时间无影响。而随着消峰电阻变大,释放触动时间和释放响应时间变小,而对释放运动时间(释放响应时间减去释放触动时间)几乎无影响。从仿真数据可以得出,消峰电阻和释放触动时间及释放响应时间成反比关系。
由式(2)可知,在稳态电流不变的情况下,随着消峰电阻R'增大,右端项i1(R'+R),即负载分压越大,左端项L(di1)/(dt),即感应电动势的绝对值越大,而电感L不变,因此电流随时间的变化越快,即释放响应时间和释放触动时间越小。
将消反峰电路去掉,对电磁阀进行仿真,得到无消反峰电路下的电流曲线,如图7所示。可以看出,断电后无消反峰电路的电流曲线形貌与有消反峰电路时完全不同。在无消反峰电路的条件下,断电后电流曲线呈现出负阶跃形貌,释放响应时间极短,大约为2 ms,并且无明显的释放触动点。
消反峰电路的主要作用是对感应电动势峰值的抑制,因此,为了研究影响感应电动势峰值的因素,对不同消峰电阻下电磁阀关闭时产生的感应电动势进行了仿真,如图8所示。图8(a)是电磁铁线圈纯电感产生的反电动势,图8(b)是消峰电阻两端的感应电压,也是对外部电路产生最直接影响的电压。数据统计见表4。
图8 不同消峰电阻下的感应电动势
Fig.8 Induced electromotance at different anti-peak resistances
表4 不同消峰电路下感应电动势统计
Tab.4 Data of induced electromotance at different anti-peak circuits
从表4可以看出,反电动势的绝对值和感应电压都是随着消峰电阻的增大而增大,呈现出线性正相关特性。
从消反峰电路的控制方程式(2)中可以解释这个现象,同样地,电流i1不变,随着消峰电阻R'的增大,整个负载的分压i1(R'+R)就会增大,即感应电压增大,反电动势的绝对值增大。
图9是无消反峰电路下对电磁阀进行仿真得到的反电动势和感应电压,对应的峰值分别为-504 V和504 V,由此可以看出消反峰电路对消除感应电动势峰值有着十分显著的作用。当没有消反峰电路时,由电磁阀产生的巨大感应电动势对继电器、电源及其他电器元件都会有潜在危害。
图9 无消反峰电路下的感应电动势
Fig.9 Induced electromotance without anti-peak circuit
在本文所述的案例中,经过仿真得到图 10所示的感应电压和释放响应时间的关系。从图 10中可以看出:感应电压与消峰电阻呈现出线性正相关特征,而释放响应时间与消峰电阻成反比。当消峰电阻大于50 Ω时,随着消峰电阻的增加释放响应时间降低的幅度较小,同时感应电压基本保持原幅度增长,因此50 Ω对于本电磁阀来说是一个转折点,综合考虑,最终选择50 Ω的消峰电阻做为本电磁阀系统的设计状态。
图 10 感应电压和释放响应时间对比
Fig.10 Comparison of induced voltage and release response time
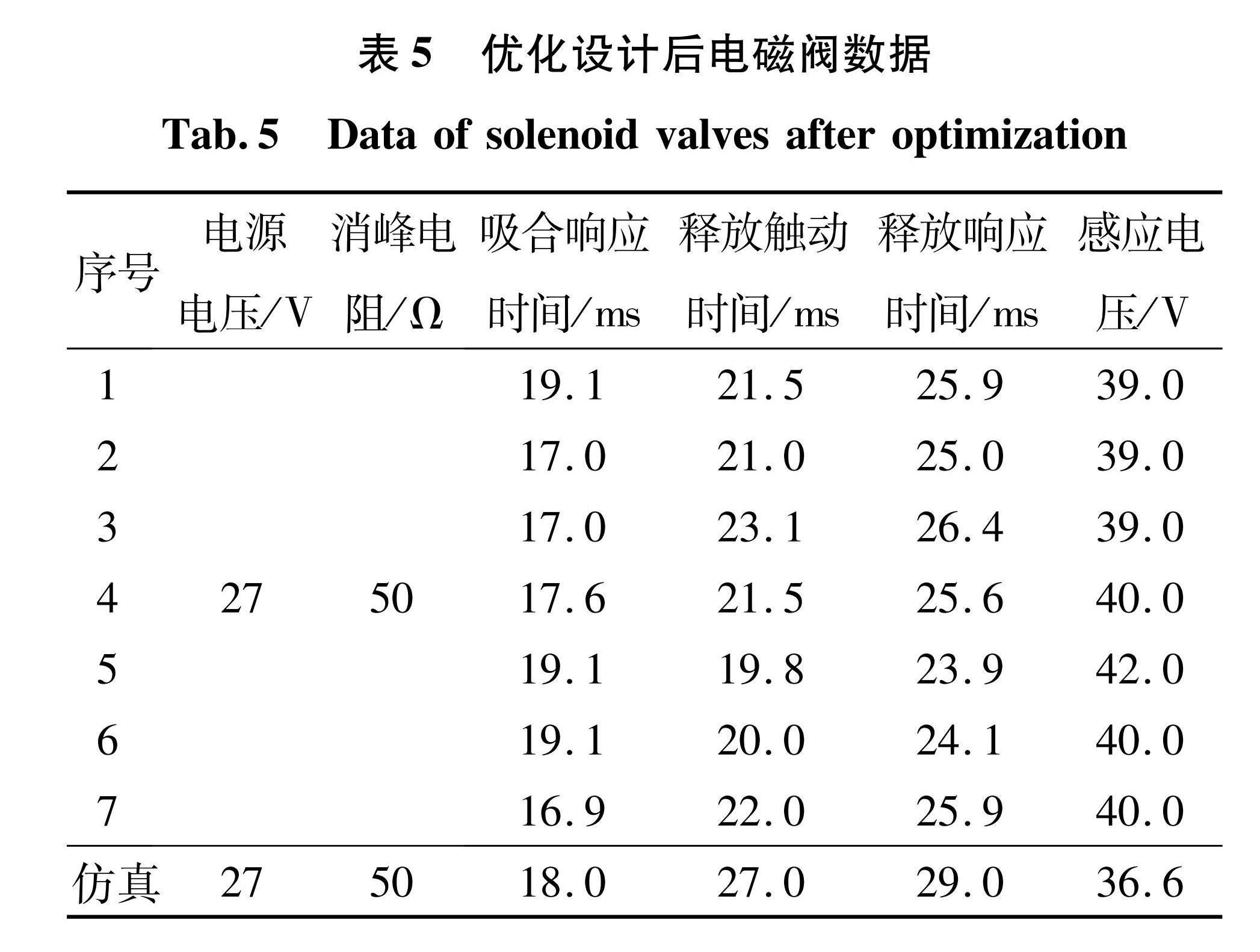
根据上述结果投产电磁阀零部件和控制系统,装配完成后进行响应试验,如图 11所示。进口介质压力取2 MPa,电源电压取27 V,消峰电阻取50 Ω,得到的电磁阀响应时间数据和感应电压如表5所示。实测的吸合响应时间和感应电压与仿真的结果吻合较好,释放响应时间和释放触动时间比仿真结果偏小,这是由于仿真用的软磁合金B-H曲线与热处理后实际软磁合金B-H曲线有一些差异。
图 11 试验装置
Fig.11 Test setup
表5 优化设计后电磁阀数据
Tab.5 Data of solenoid valves after optimization
本文通过Maxwell软件对电磁阀及消反峰电路进行了仿真,研究了消反峰电路对电磁阀性能的影响, 为进一步优化电磁阀系统提供了方案。 通过分析,本文得出以下结论。
1)通过对比电磁阀仿真和试验的结果,可以得出利用Maxwell软件对电磁阀及消反峰电路的仿真具有较强的可行性,仿真结果可用于辅助电磁阀的设计。
2)消反峰电路对电磁阀释放响应时间有显著影响。消峰电阻与释放响应时间成反比,而对吸合响应时间无影响。
3)消反峰电路对电磁阀感应电动势有显著影响。相对于无消反峰电路时产生的较大的感应电动势,消反峰电路的存在可以显著降低感应电动势的峰值,并且消峰电阻与感应电动势成正相关。
4)当电磁阀本身设计受限时,可以通过合理设计消反峰电路来优化电磁阀系统,随着消峰电阻增加,释放响应时间曲线和感应电压曲线会出现一个拐点,电阻大于该值后释放响应时间降低的幅度减小,而此时的感应电压仍保持原幅度增长。因此在满足系统要求的前提下可以考虑采用该点的电阻值作为设计点,以期得到最大的收益。