本文结果与讨论共包含两部分内容:2.1节研究了介质为常温水时,球型调节阀在不同压差和开度下的流场分布特征和液动力矩演化规律,将总液动力矩按照分布位置不同进行了分类; 2.2节主要研究了介质为液氧时,实际发动机工况下的液动力矩和流场演化特征,同时提出了液动力矩优化方案,通过数值仿真获得了优化后模型在发动机工况下的液动力矩大小,并经过试验数据对比验证,验证了本文液动力矩优化方案的有效性,极大提高了发动机安全可靠性。
2.1 液动力矩的分布特性和演化规律
球阀在任意角度运行时,阀芯承受流体分布压强,其合力称为液动力,液动力分为稳态液动力和瞬态液动力,与稳态液动力相比,瞬态液动力一般可以忽略不计[22]。稳态液动力对阀芯操纵有很大影响,特别是在高压大流量的液体火箭发动机中,需要避免液动力大于控制力,使阀芯动作失效的情况。准确预测球阀液动力矩,通过优化设计结构降低电机维持球阀开度所需的力矩,对提高发动机可靠性、实现发动机轻量化具有十分重要的意义。目前在球阀设计中,稳态液动力矩的取值来源于文献[39]提出的经验公式,即
M=md3Δp(5)
式中:M为液动力矩; m为开度系数; d为流道直径; Δp为压差。式(5)表明球阀阀芯所受液动力矩与开度、流道直径和压差有关。
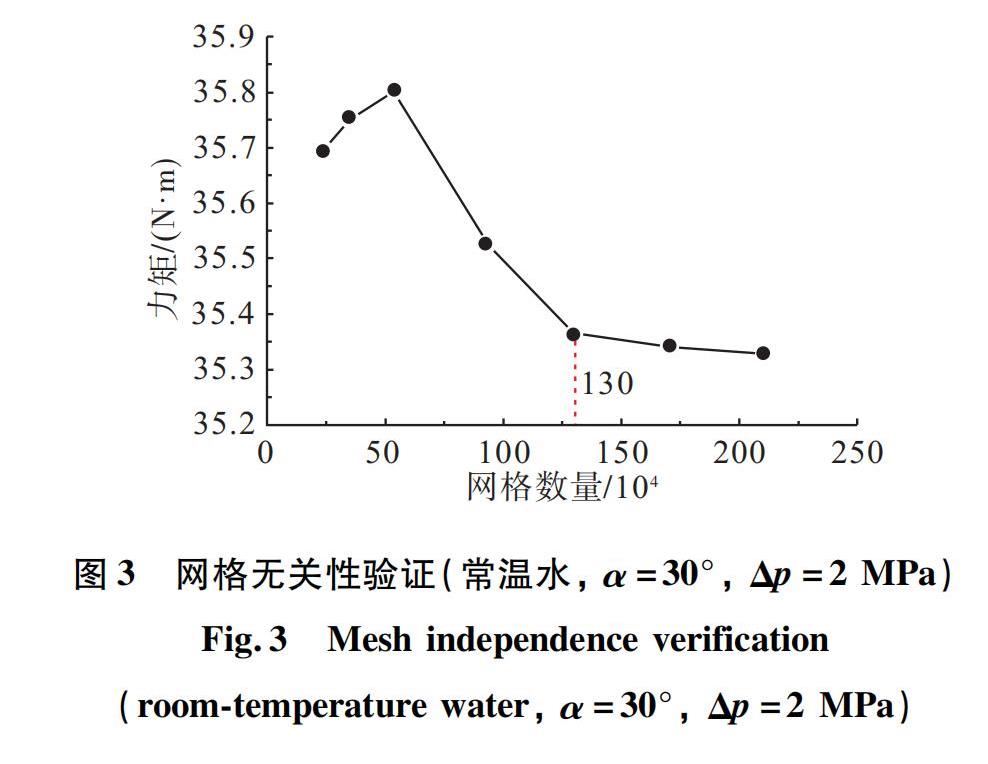
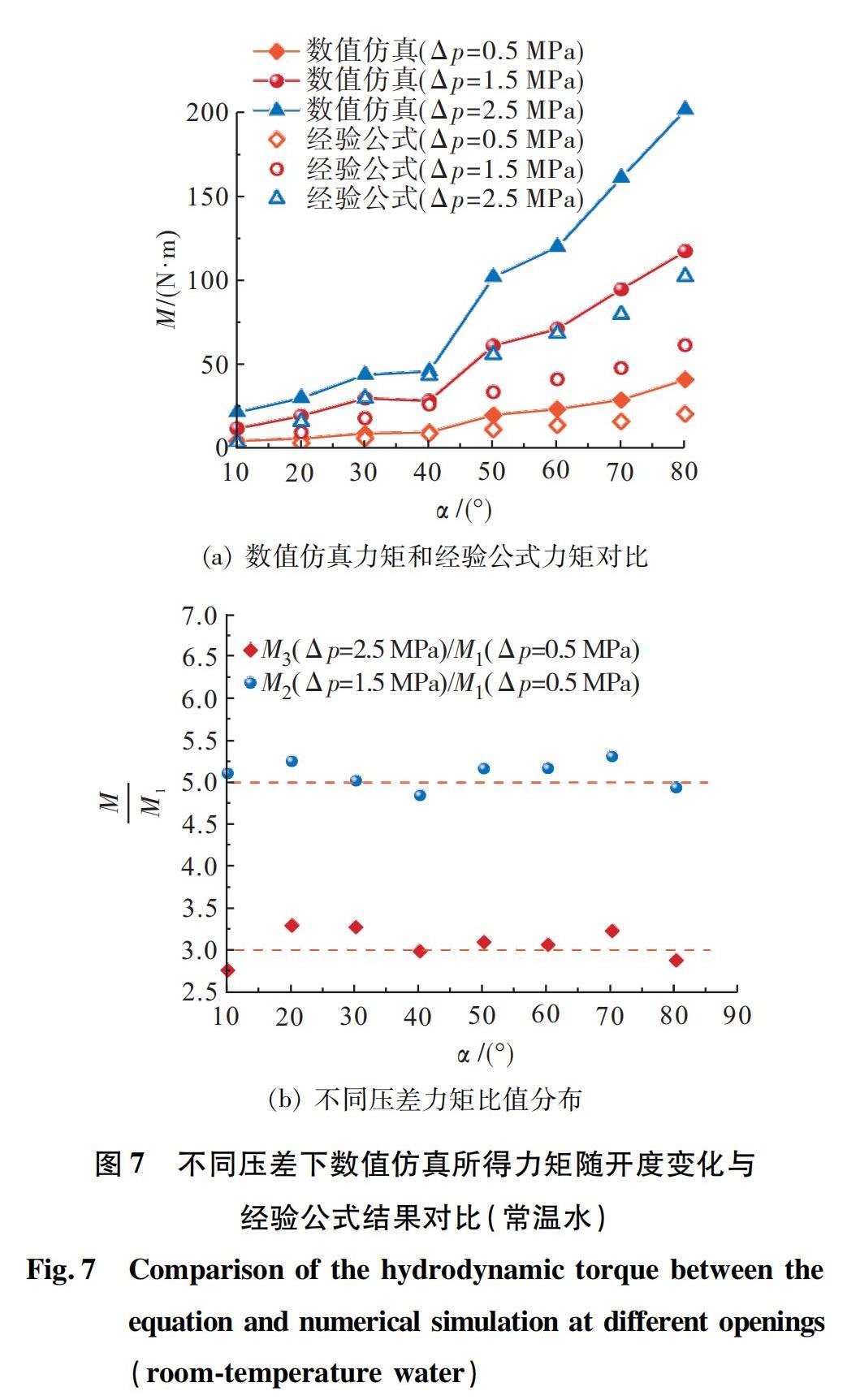
本文首先对比了数值仿真和依据经验公式[式(5)]获得的3种压差下(0.5、1.5、2.5 MPa)阀门液动力矩随开度的演化特性。如图7(a)所示,离散点代表经验公式预测的力矩结果,实线代表数值仿真数据,二者预测力矩变化趋势相一致,在相同压差下,阀门液动力矩随开度的增加逐渐增加。经验公式无法判断力矩方向,而数值仿真所得力矩方向均为使阀芯关闭。在同一压差下,开度大于40°时,数值仿真和经验公式结果存在显著的差异。当压差0.5 MPa增加到2.5 MPa时,数值仿真结果和经验公式预测结果差异显著增加。如图7(a)所示,开度为50°时,3种压差(0.5、1.5、2.5 MPa)下数值仿真得到的力矩和经验公式预测结果差值分别为8.6 N·m、21.5 N·m、46.1 N·m,维持调节阀正常工作的电机额定力矩为50 N·m。这表明基于经验公式的液动力矩预测在压差大于1.5 MPa时具有显著的误差。图7(b)给出了不同压差下力矩比值分布,纵坐标为力矩比值。由图7(b)可知:相同开度下,压差从0.5 MPa分别增加到1.5 MPa和2.5 MPa, 液动力矩增加也分别近似为3倍和5倍,所以液动力矩和压差近似呈线性关系,与经验公式预测趋势相一致。随着新型发动机推力和系统工况压差的进一步增加,在未来新型号研制工作中,基于经验公式的力矩预测结果不再具有参考价值,必须开展相应的CFD数值仿真工作获得液动力矩,为调节阀电机的选取提供准确的力矩数值。
(a)数值仿真力矩和经验公式力矩对比
(b)不同压差力矩比值分布
图7 不同压差下数值仿真所得力矩随开度变化与经验公式结果对比(常温水)
Fig.7 Comparison of the hydrodynamic torque between the equation and numerical simulation at different openings(room-temperature water)
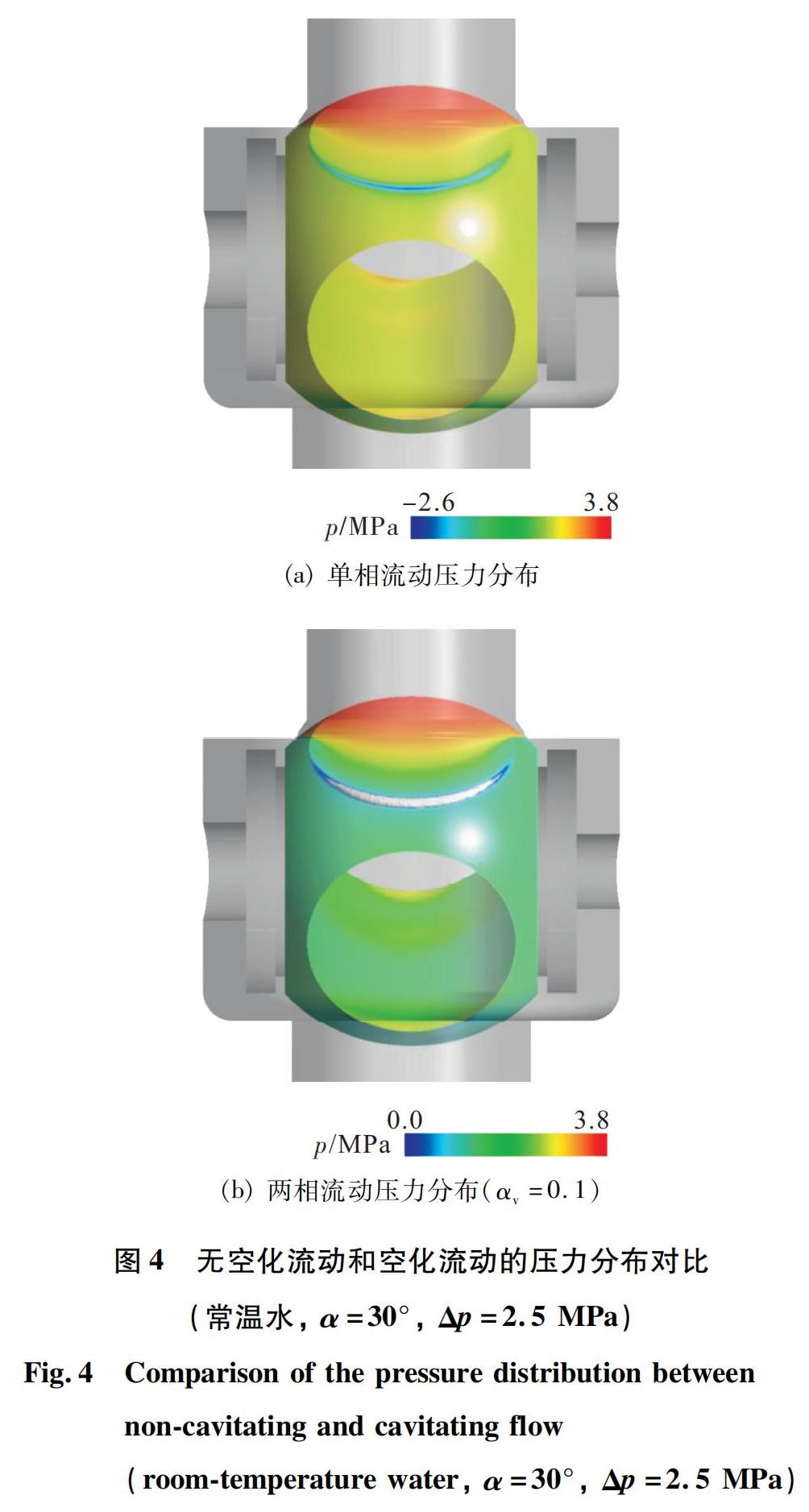
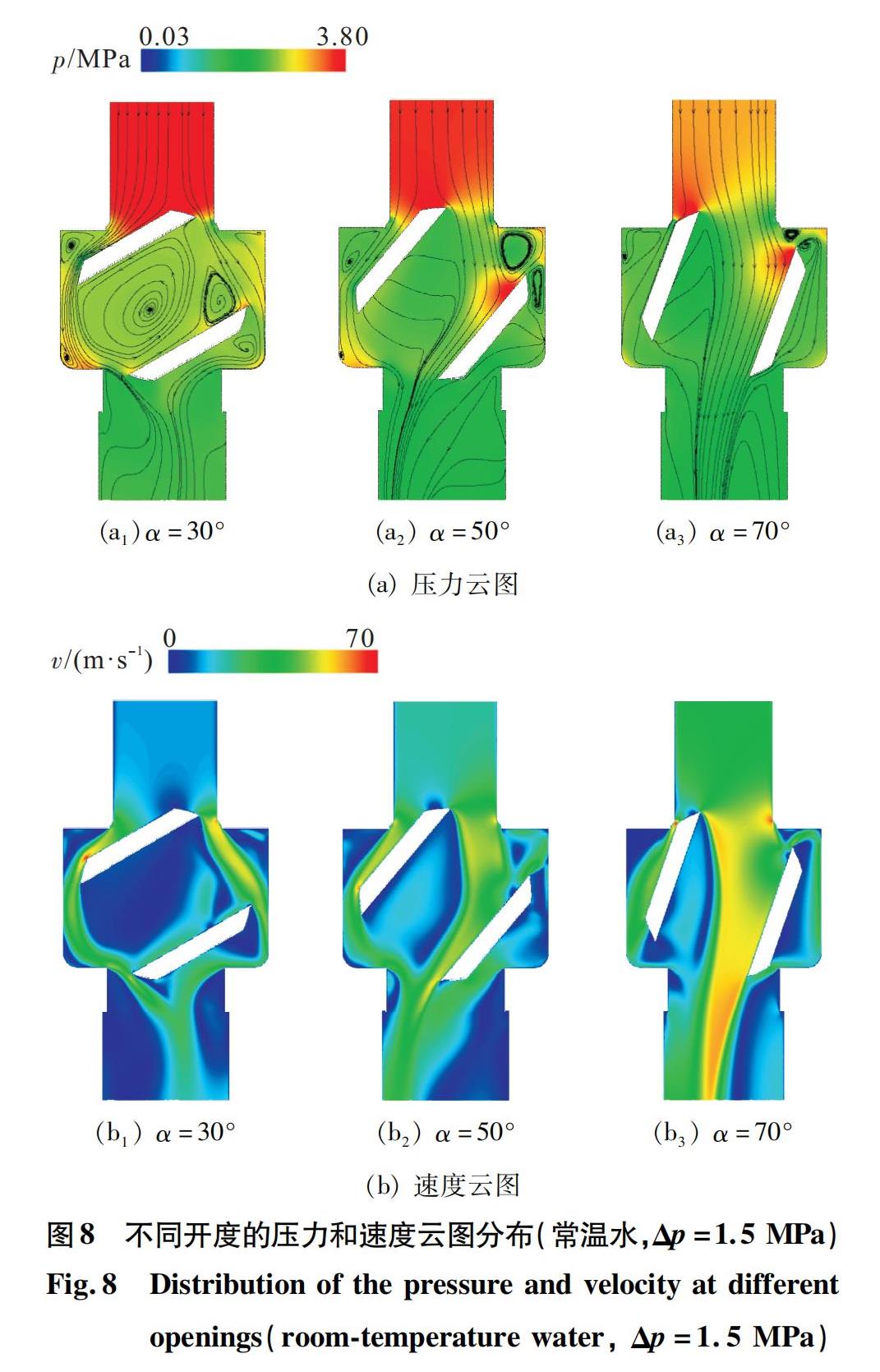
图8给出了Δp=1.5 MPa时3种典型开度下的压力和速度分布云图,流动方向为从上到下。3种开度下介质均会流经两侧的间隙流道和中间的主旋转通道,随着开度的增加,间隙流道横截面积单调变小,主旋转通道横截面积单调增加。阀芯开度α=30°时,主旋转通道下壁面形成一个漩涡区域,同时在主旋转通道其他区域观察到一个显著的漩涡结构。随着开度的增加,主旋转通道下壁面的漩涡结构逐渐向上移动,在α=70°时,漩涡出现在靠近阀腔上壁面处。而主旋转通道剩余区域的显著漩涡结构在α=50°和α=70°时均未观察到。α=30°时间隙流道区域的速度大于主流道,平均速度为47 m/s,阀门流通能力取决于间隙流道大小。而α=70°时,主旋转通道区域的平均速度为65 m/s。
图8 不同开度的压力和速度云图分布(常温水,Δp=1.5 MPa)
Fig.8 Distribution of the pressure and velocity at different openings(room-temperature water, Δp=1.5 MPa)
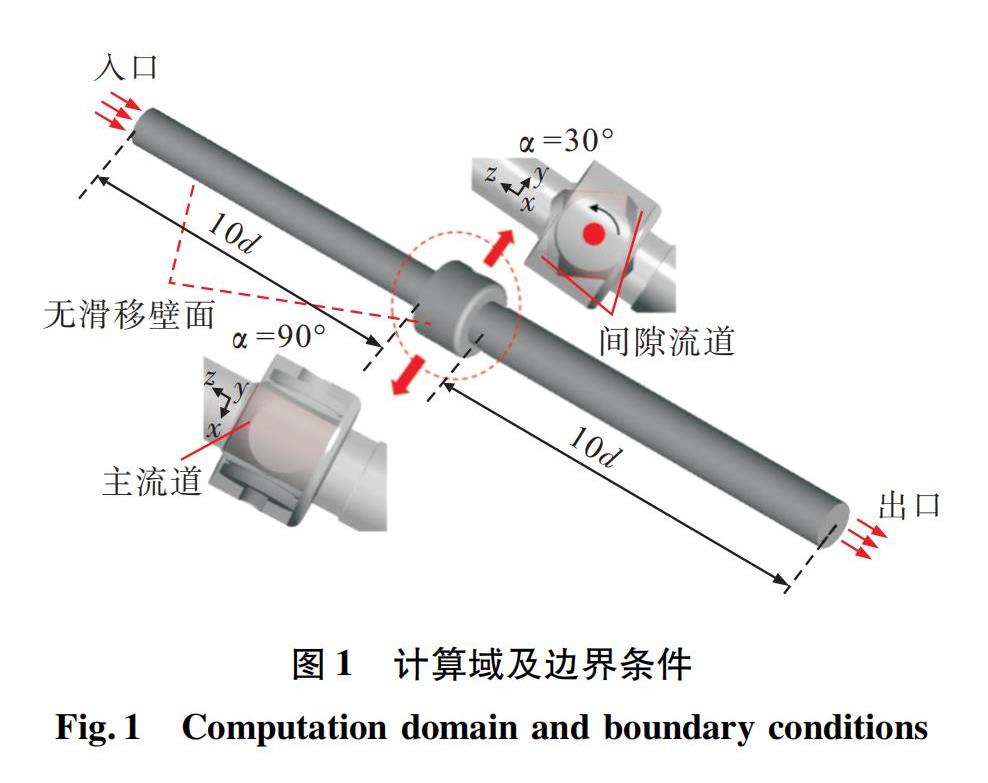
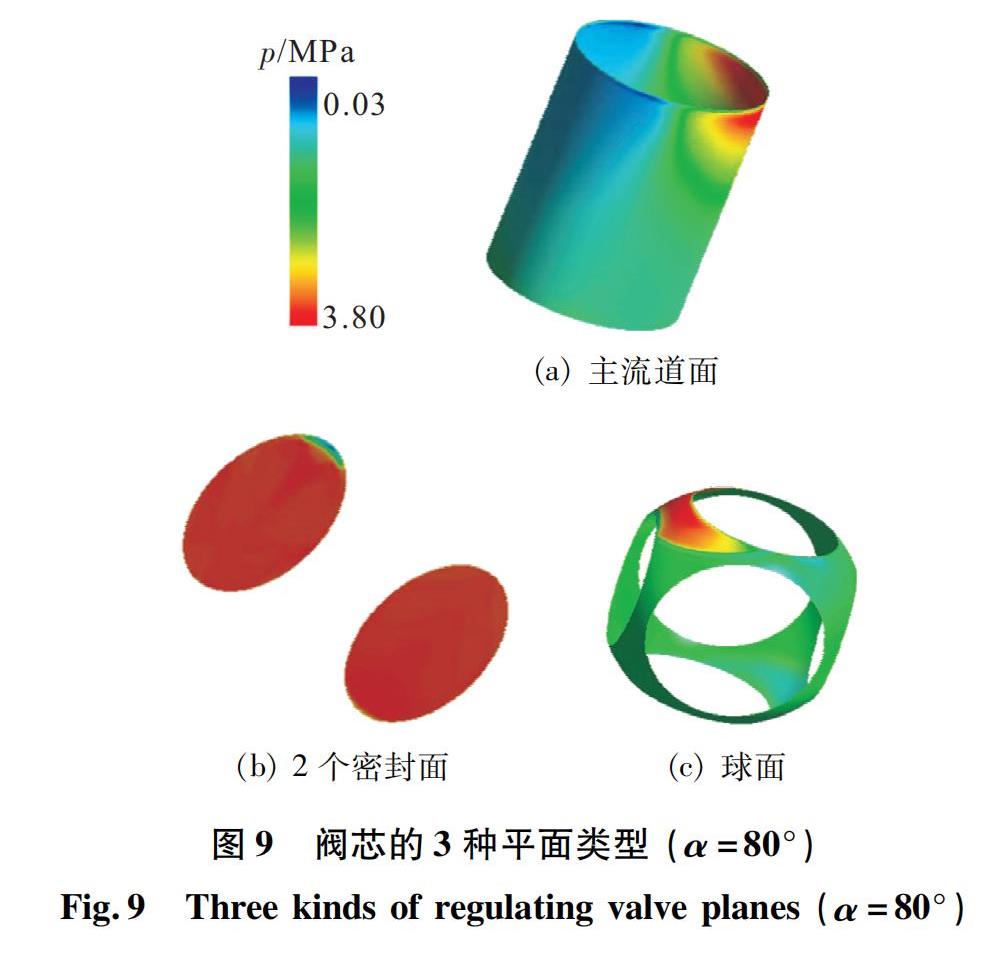
液动力矩是电动调节球阀设计的一个重要参数,是电机设计最重要的依据。数值仿真的液动力矩通过CFD Post软件可以直接提取,提取液动力矩需要确定旋转轴和二维平面。旋转轴为图1所示的x轴。为了分析阀芯液动力矩的分布特性,本文将阀芯分为3种类型的二维平面,如图9所示,分别为主流道面、密封面和其他球面。
图9 阀芯的3种平面类型(α=80°)
Fig.9 Three kinds of regulating valve planes(α=80°)
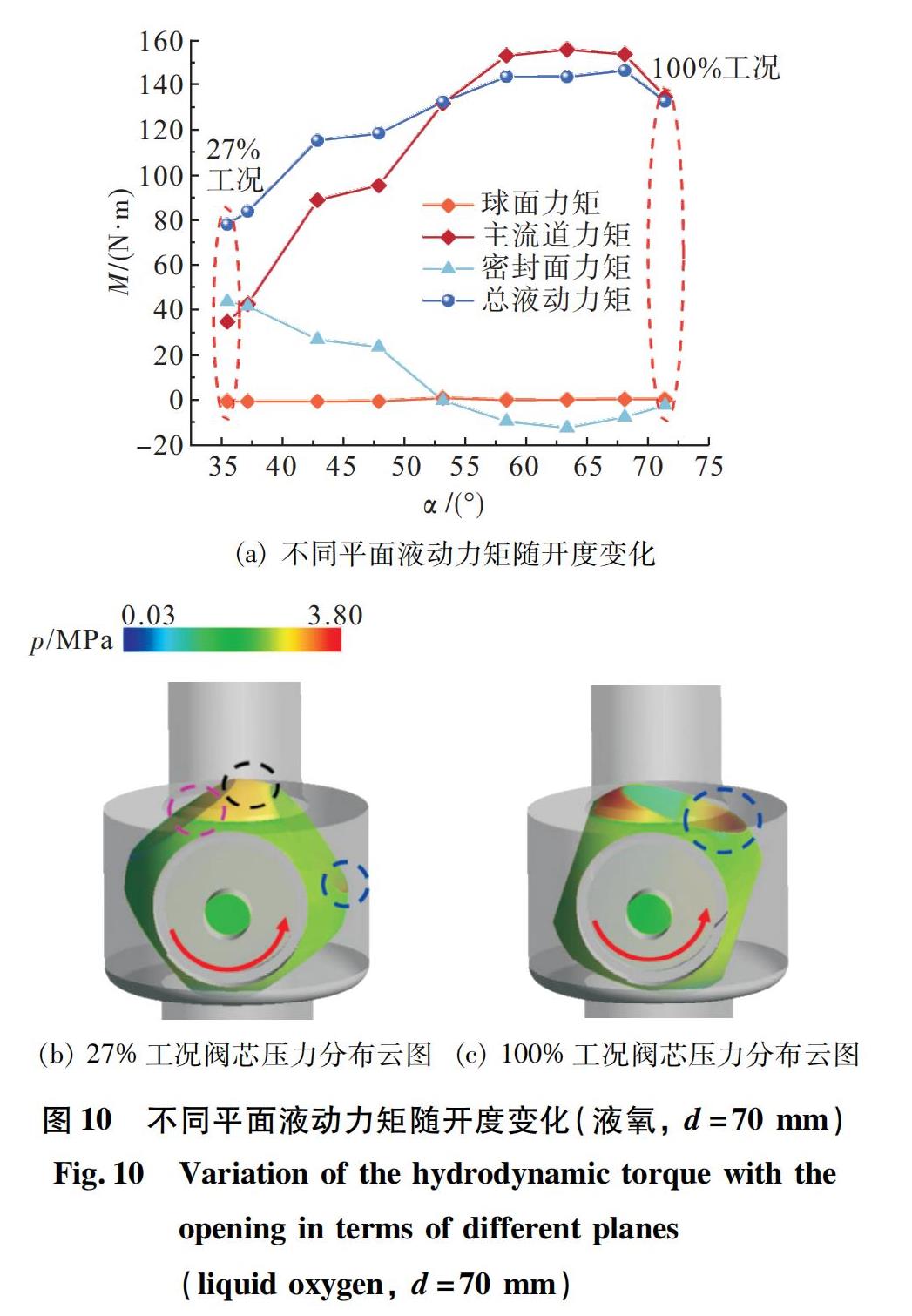
图 10给出了发动机在27%~100%运行工况下调节球阀3种平面受到的液动力矩随开度演化规律,力矩数值为正代表阀芯关闭,力矩数值为负代表阀芯打开。在所有开度下,球面受到的液动力矩数值近似为0,这表明球阀液动力矩由主流道力矩和密封面力矩组成。如图 10所示,随着开度增加,主流道力矩先增加后减小,最大值为155.7 N·m,出现在α=63°左右。 而密封面力矩最大值为43.8 N·m,出现在α=36°时。随着开度增加,密封面力矩先减小后增加。α>53°时,密封面所受力矩数值变为负值,方向由使阀芯关闭变为使阀芯打开。
为了分析3种平面液动力矩的演化规律,图 10(b)和图 10(c)分别给出了27%工况和100%工况下的阀芯压力云图,阀芯打开方向为逆时针。27%工况时α=36°,此时开度较小,3种平面压力分布区域如图中虚线区域所示。密封面液动力矩主要来源于上密封面的粉色虚线区域,该区域面积随着开度的增加逐渐减少,因此密封面液动力矩逐渐减小,在100%工况时,上密封面不会受到介质的压力,此时密封面液动力矩数值为0 N·m。蓝色区域为主流道压力分布显著的区域,在100%工况α=72°时,该区域可以观察到显著的高压分布特征。
在额定100%工况运行时总液动力矩为132.8 N·m,远大于电机的额定工况50 N·m,这就需要增加电机力矩,但会使电机结构质量增加,不符合轻质化设计要求。因此,亟需针对该型球阀开展液动力矩优化设计工作,在不增加电机力矩的前提下保障电动球阀的正常运行。
图 10 不同平面液动力矩随开度变化(液氧, d=70 mm)
Fig.10 Variation of the hydrodynamic torque with the opening in terms of different planes(liquid oxygen, d=70 mm)
2.2 液动力矩的优化设计
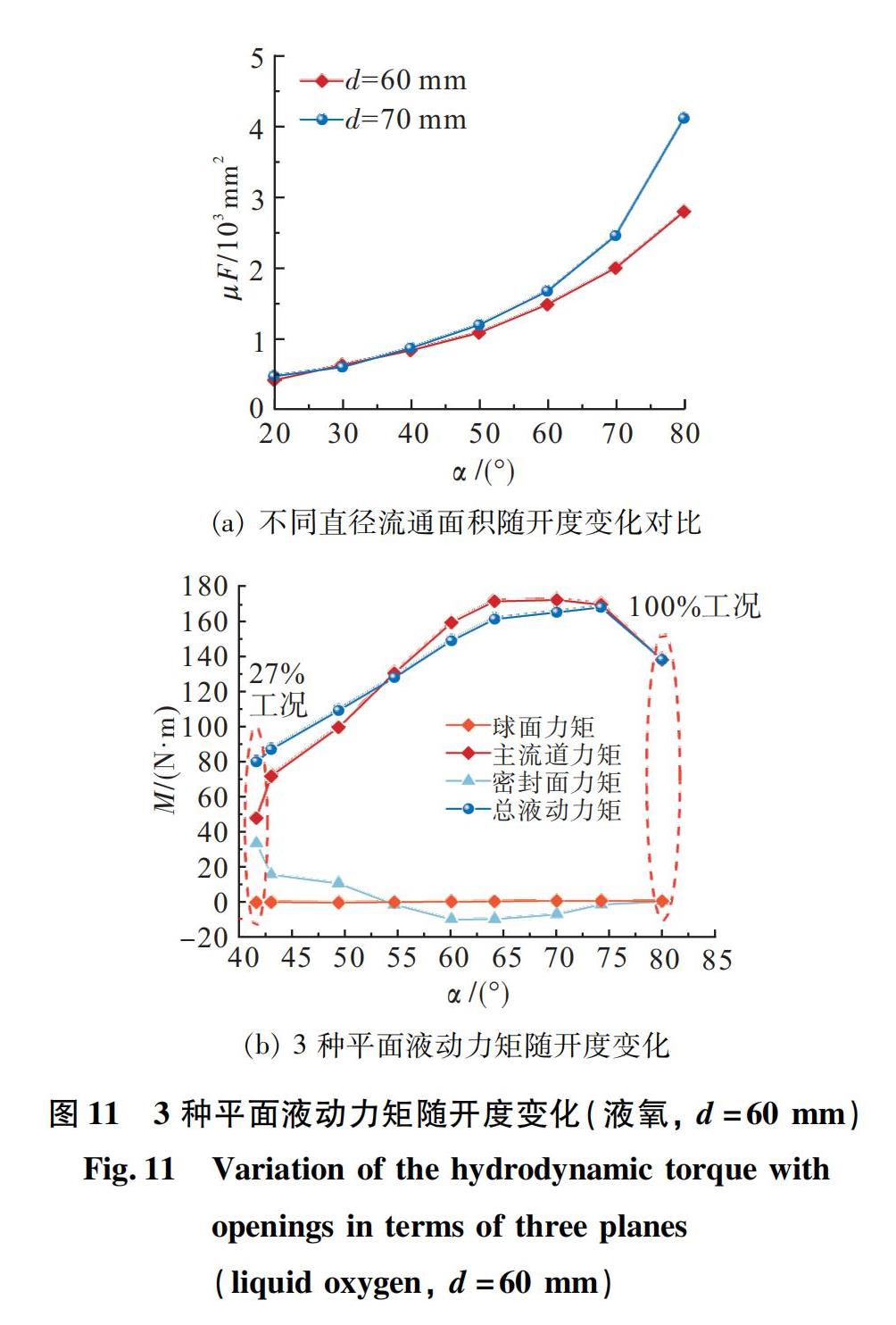
在阀门设计过程中,为了降低阀芯液动力矩,设计人员依据经验公式(5)往往采用减小主流道直径的方案。图 11(a)给出了不同开度下,主流道直径分别为60 mm和70 mm时的阀门流通面积。相同开度时,降低主流道直径,会使得阀门流通面积下降,开度越大,流通面积下降越多。相同发动机系统工况下,与70 mm的阀芯相比,60 mm的阀芯需要增加开度以满足系统流通面积要求。
阀芯球径d=60 mm时,发动机在27%~100%运行工况下的3种平面液动力矩随开度变化如图 11(b)所示。每个工况下的开度与球径d=70 mm的开度[如图 10(a)所示]相比均有所增加,其中27%工况和100%工况下开度分别增加了8.5°和6.0°。d=60 mm时3种平面液动力矩随开度变化趋势与d=70 mm保持一致。其中球面液动力矩近似为0。与球径d=70 mm时液动力矩[如图 10(a)所示]相比,d=60 mm时100%工况下阀芯总液动力矩增加了4.3 N·m。其中密封面最大力矩降低了10.4 N·m,主流道最大力矩增加了20.1 N·m,总液动力矩最大值增加了24.5 N·m。这是由于相同工况下d=60 mm的阀芯开度变大导致的。增加开度使得密封面压力分布区域减小,密封面液动力矩减小,而主流道压力分布区域增加,总液动力矩增加。因此,采用降低阀芯流道直径的方案时,相同发动机工况下阀芯开度增加,使得阀芯总液动力矩增加,不满足降低力矩要求。
图 11 3种平面液动力矩随开度变化(液氧, d=60 mm)
Fig.11 Variation of the hydrodynamic torque with openings in terms of three planes(liquid oxygen, d=60 mm)
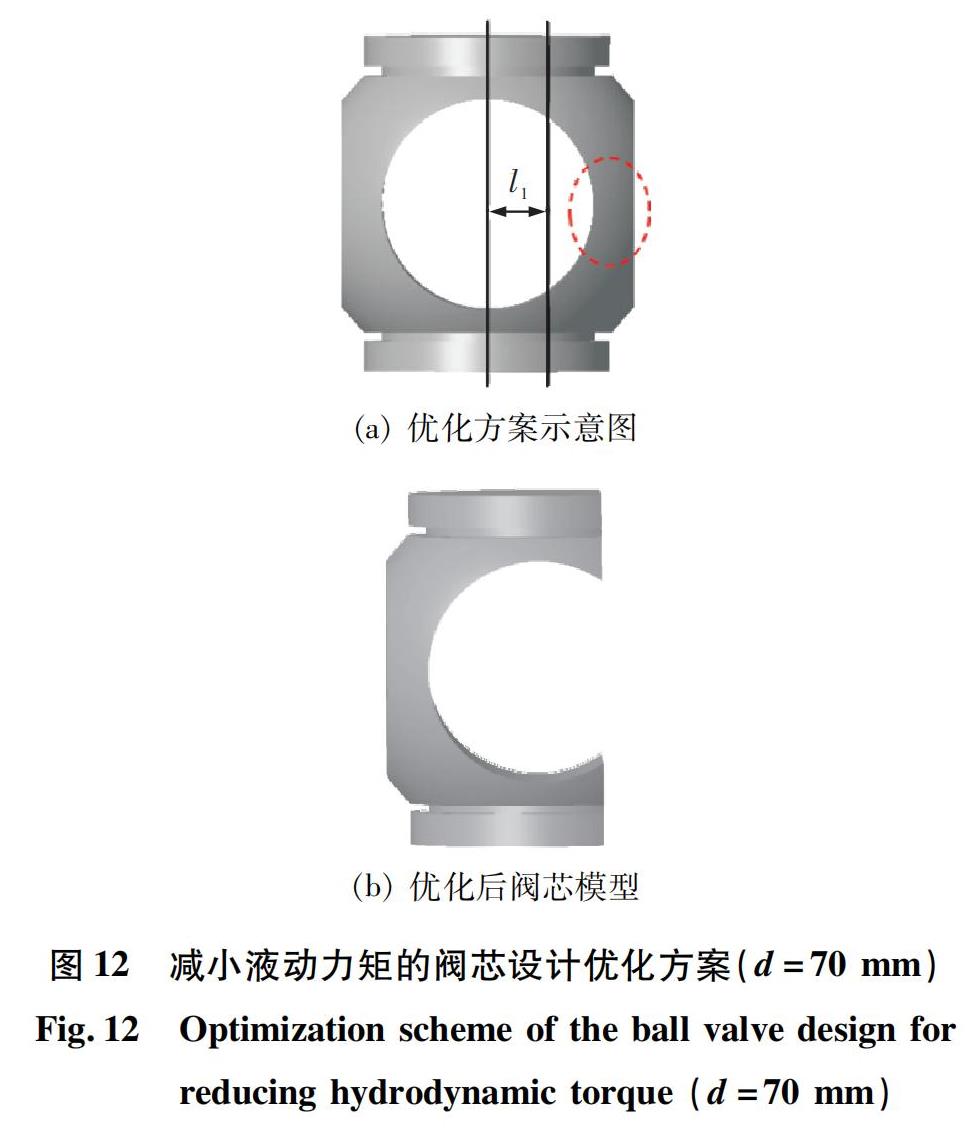
由CFD数值仿真提取的3种平面力矩结果可知,为了减小总液动力矩,需要对密封面和主流道面进行优化设计。为了保证阀门全闭状态的密封效果,密封面优化设计受到很大限制,本文主要针对主流道进行优化设计研究。图 10分析结果表明主流道液动力矩来源于入口下壁面位置,削掉下壁面可以使介质不会对阀芯产生显著的压力分布。图 12(a)给出了本文的优化方案示意图,在距离球心l1处削去右侧的全部球体,优化后的阀芯模型如图 12(b)所示。
图 12 减小液动力矩的阀芯设计优化方案(d=70 mm)
Fig.12 Optimization scheme of the ball valve design for reducing hydrodynamic torque(d=70 mm)
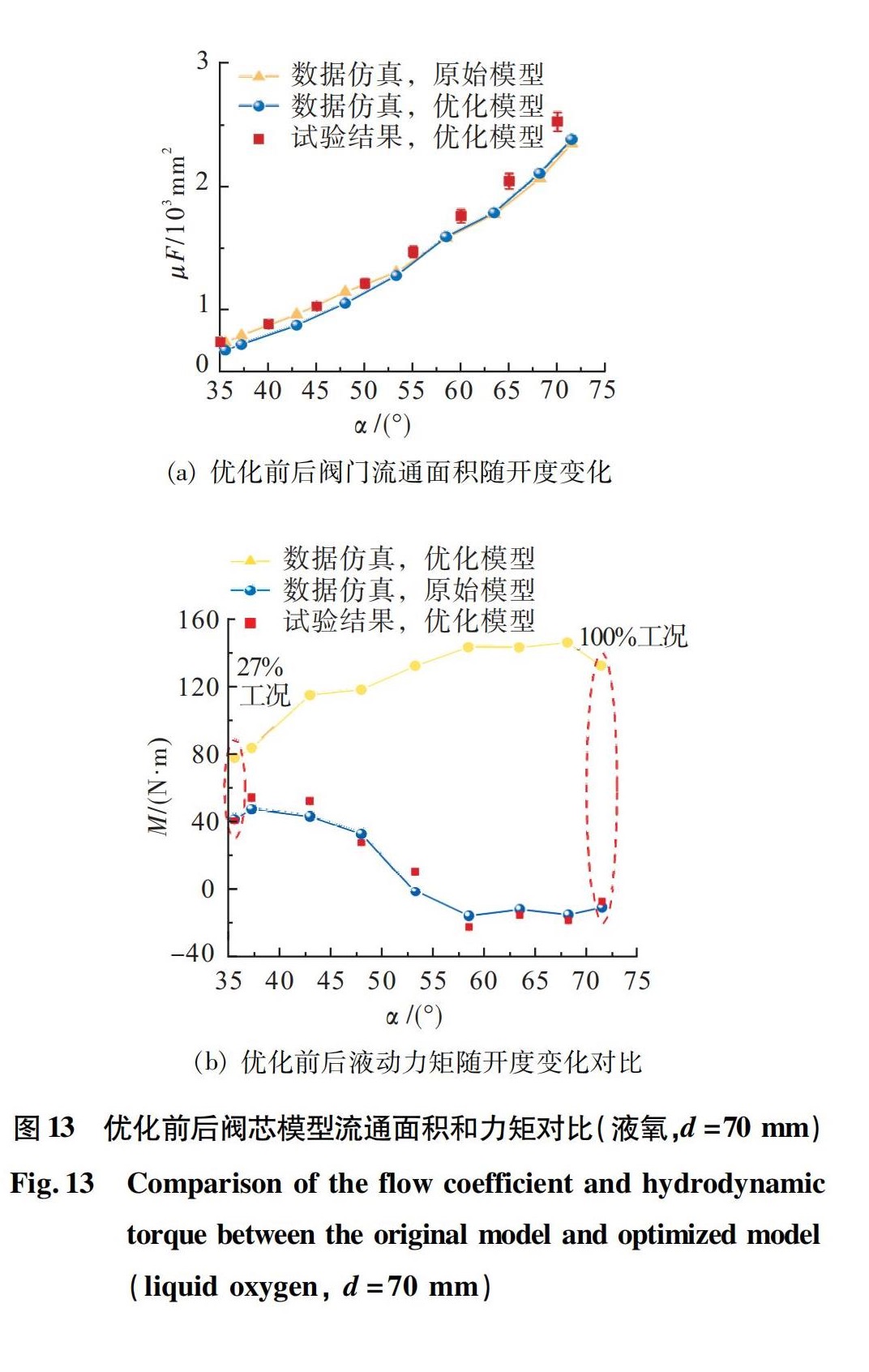
图 13(a)和图 13(b)分别给出了优化前后模型的流通面积和液动力矩对比示意图。如图 13(a)所示,相同开度时,优化模型的流通面积与原始模型基本一致,这表明相同发动机工况时,优化模型具有与原始模型相同的阀芯开度。如图 13(b)所示,与原始模型相比,优化后模型液动力矩显著下降,力矩最大值为52 N·m,减小了94.4 N·m。其中100%工况下优化模型液动力矩为-13.2 N·m,方向为使阀芯打开。现有电机最大操纵力矩为80 N·m,具备维持球阀正常运行的能力。优化模型力矩随着阀芯开度增加而降低,数值大小和演化趋势与原始模型的密封面力矩基本一致。这是因为优化模型削掉了主流道下壁面,使得主流道力矩降低为0。此时优化模型的总液动力矩即为密封面力矩。
图 13 优化前后阀芯模型流通面积和力矩对比(液氧,d=70 mm)
Fig.13 Comparison of the flow coefficient and hydrodynamic torque between the original model and optimized model(liquid oxygen, d=70 mm)
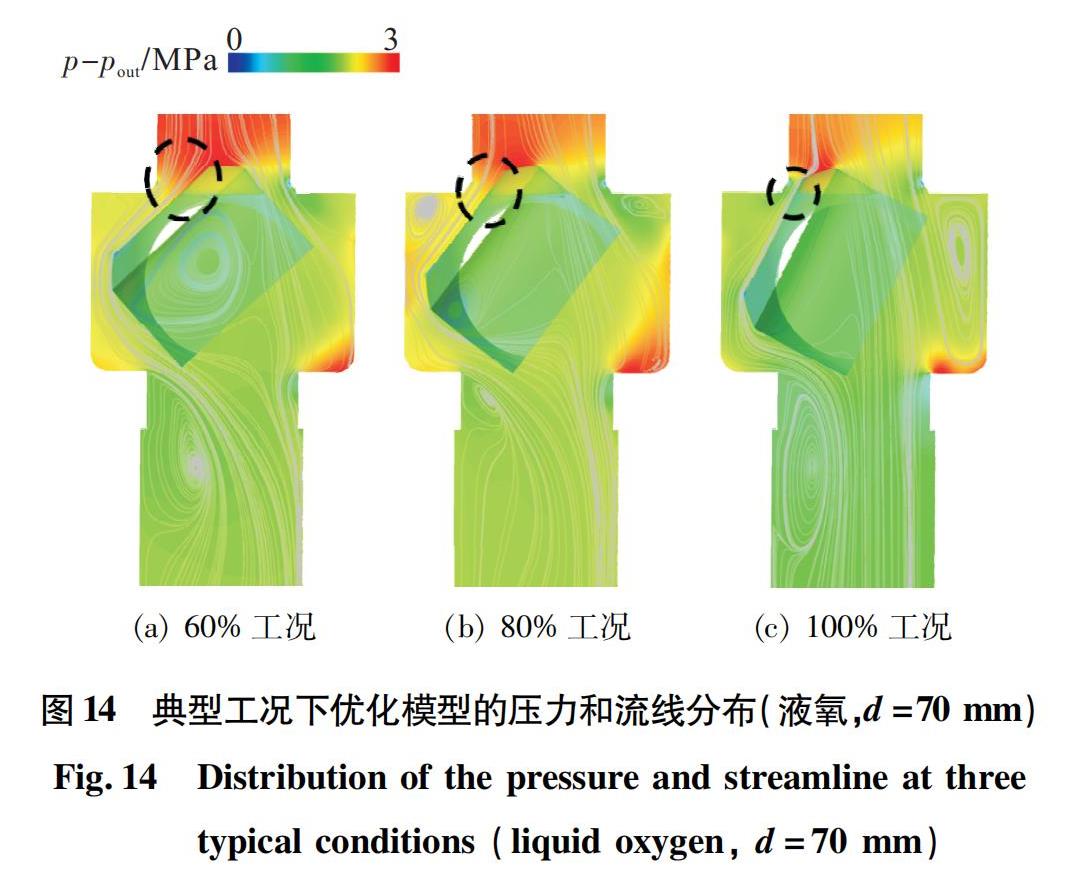
典型工况下优化模型的压力云图和流线分布如图 14所示。60%工况时在主流道中心区域和阀芯出口分别观察到了显著的漩涡结构。随着开度的增加,主流道漩涡结构消失。100%工况时在阀芯右侧观察到漩涡结构。与原始模型相比,优化模型的压力分布区域由主流道下壁面区域转移到壳体右下角壁面区域,此时阀芯液动力矩主要来源于图中黑色虚线所示的密封面区域,低工况的力矩大于高工况。
图 14 典型工况下优化模型的压力和流线分布(液氧,d=70 mm)
Fig.14 Distribution of the pressure and streamline at three typical conditions(liquid oxygen, d=70 mm)