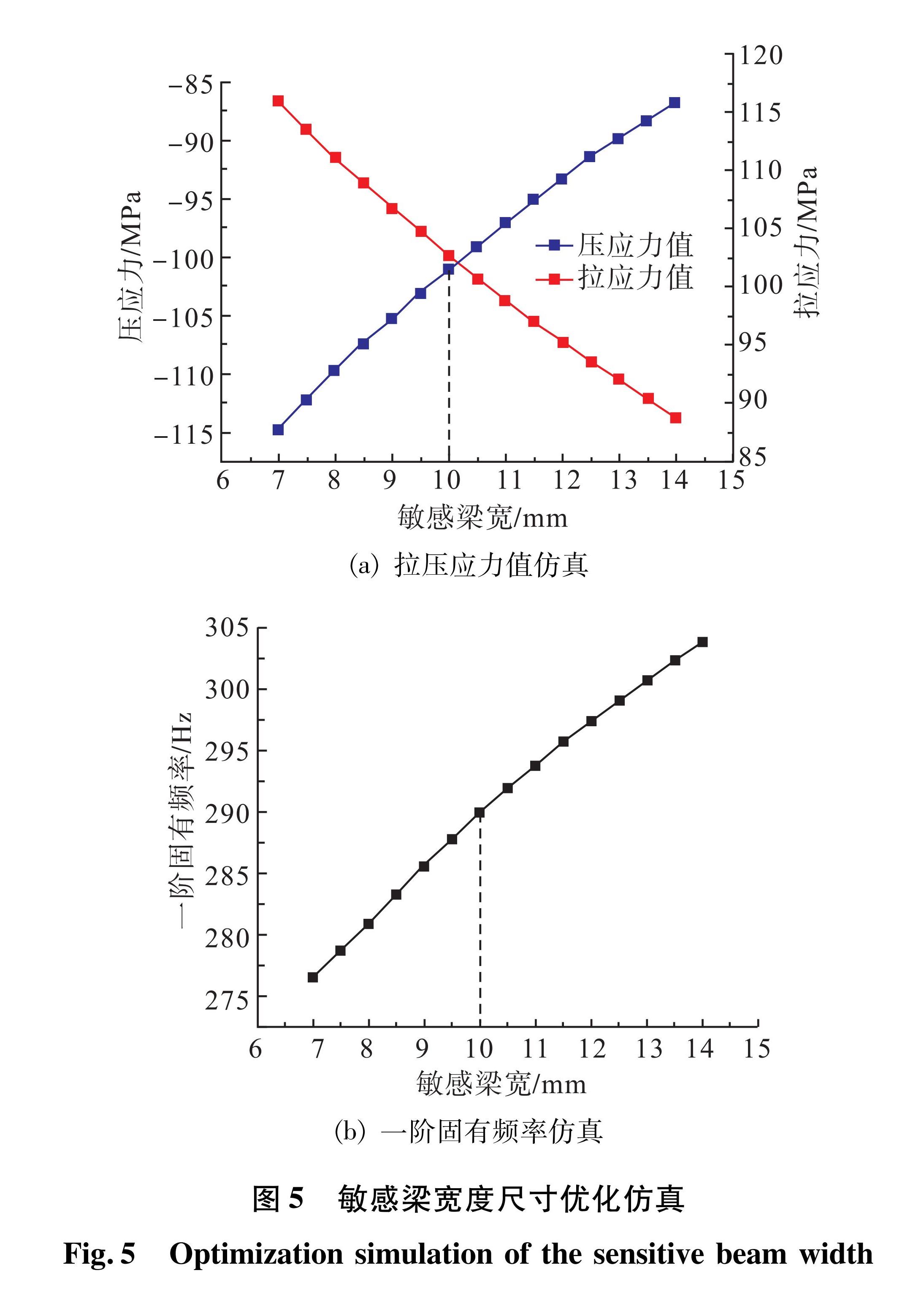
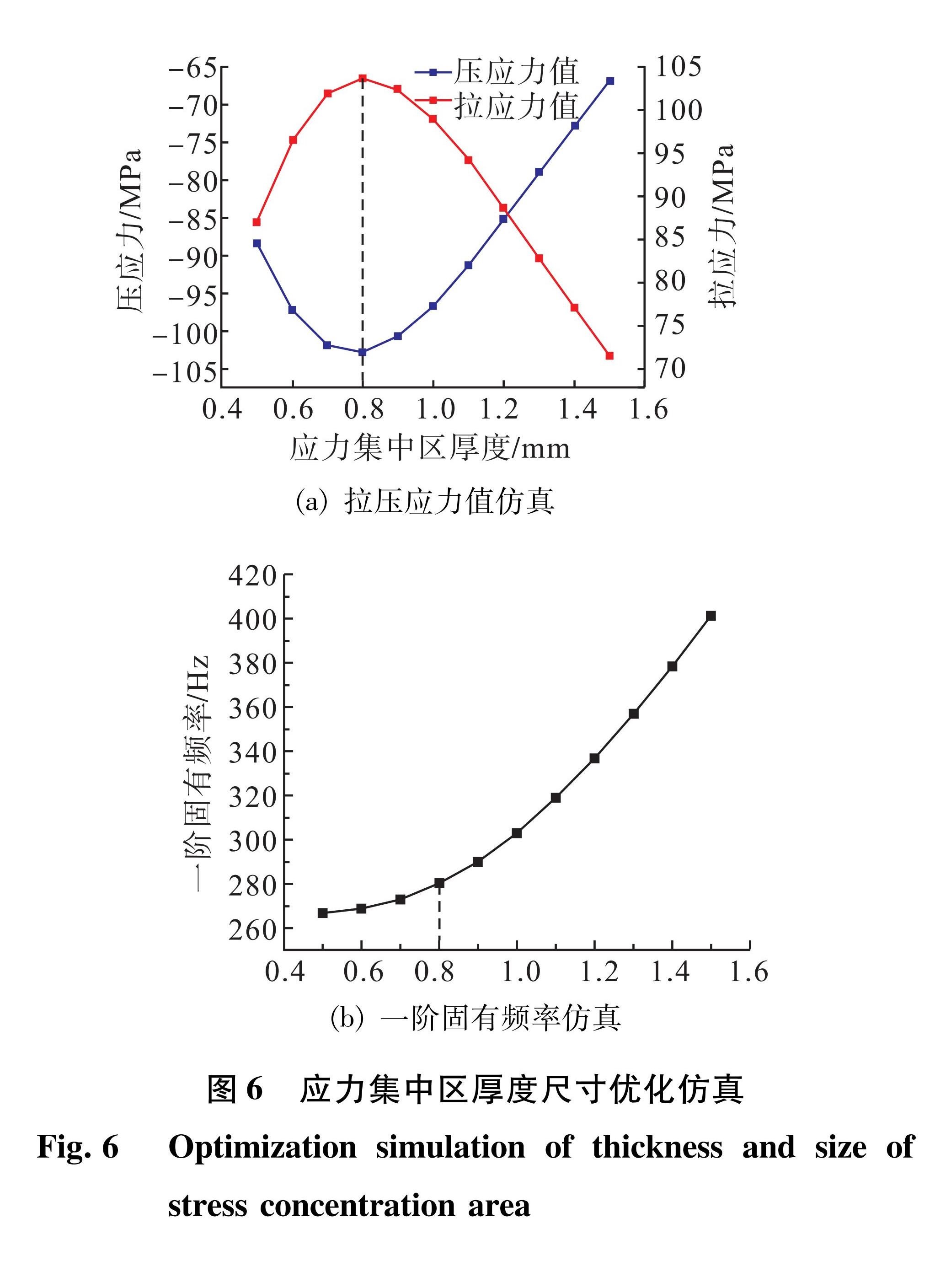
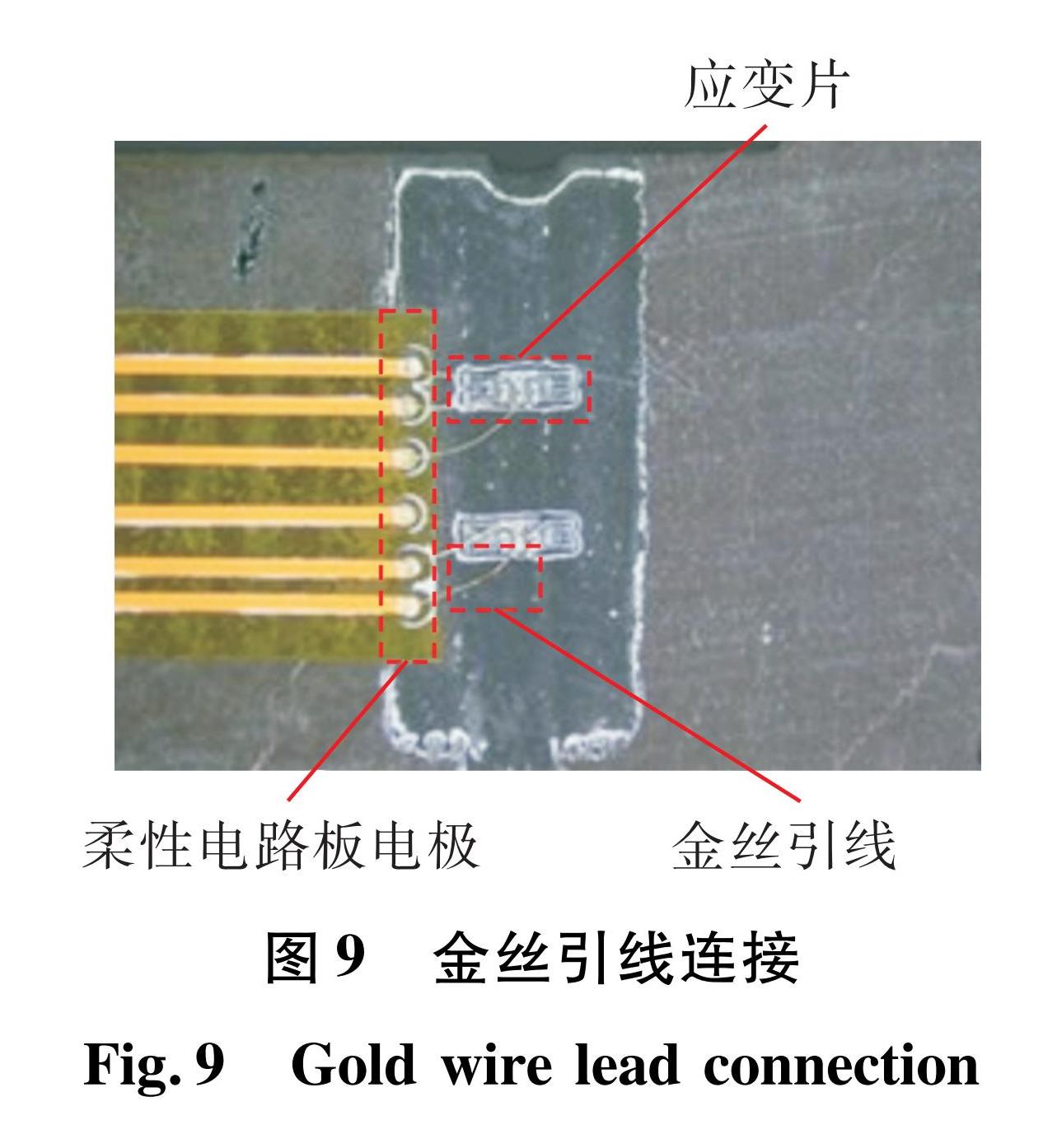
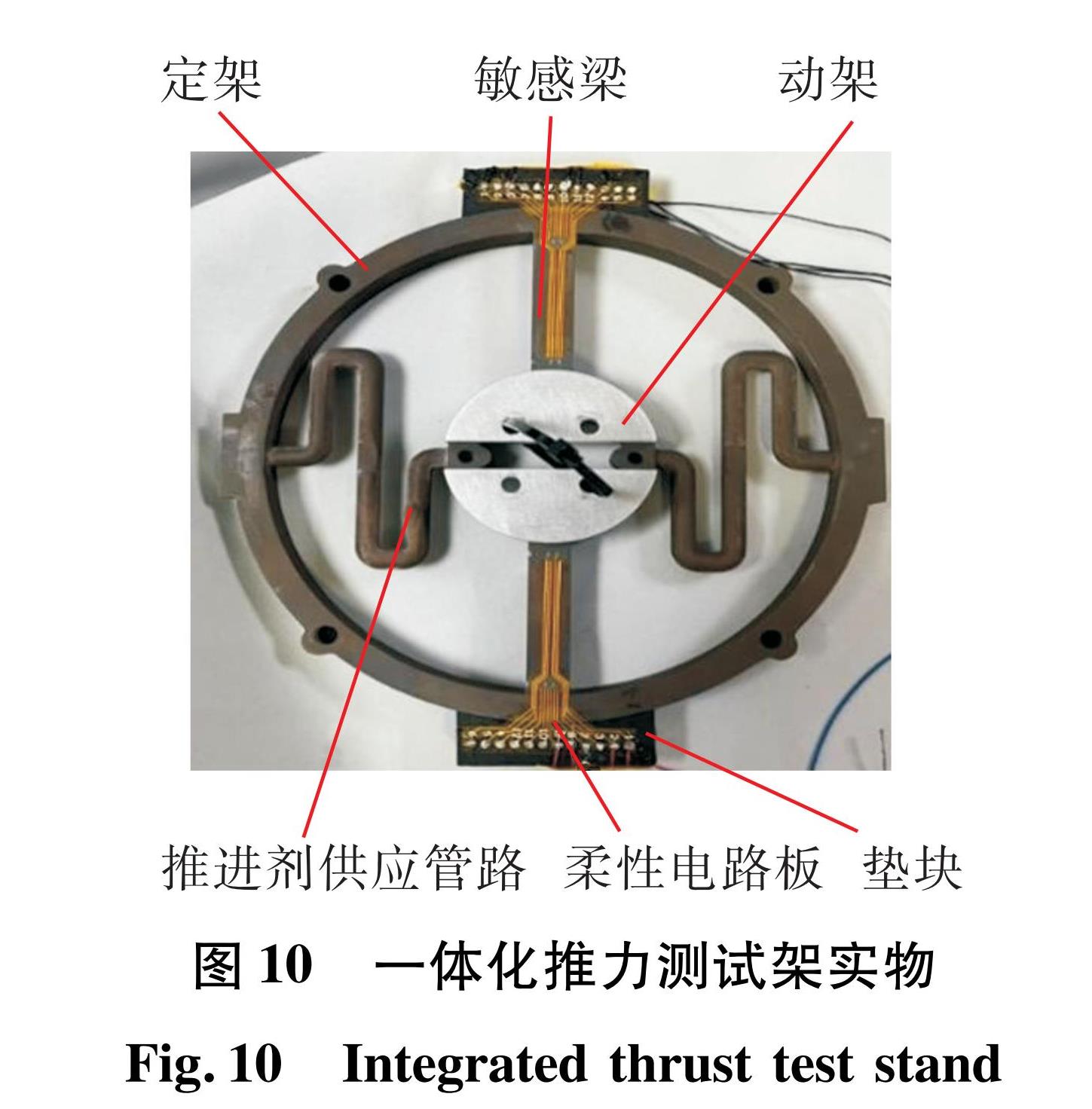
将4个应变片分别布置在推力测试架的4处应力集中区域上,由于不同位置的应力集中区域分别承受拉/压应力,从而构成惠斯通全桥。将应变片的电极与柔性电路板(flexible printed circuit,FPC)上的沉金焊盘通过金丝引线进行连接(见图9),之后在FPC的后端通过焊锡将低阻导线焊接在沉金焊盘上,如图 10所示。
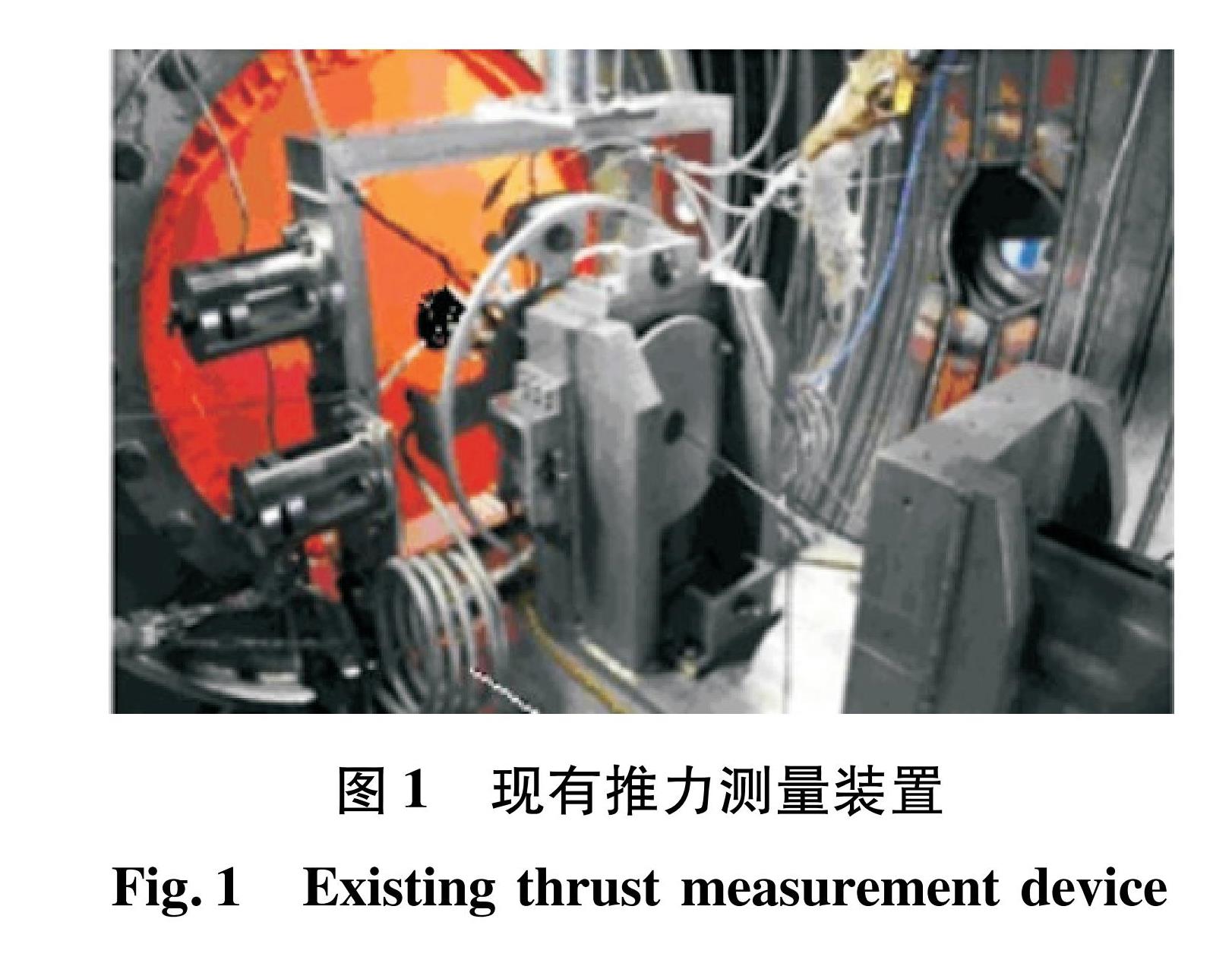
图9 金丝引线连接
Fig.9 Gold wire lead connection
图 10 一体化推力测试架实物
Fig.10 Integrated thrust test stand
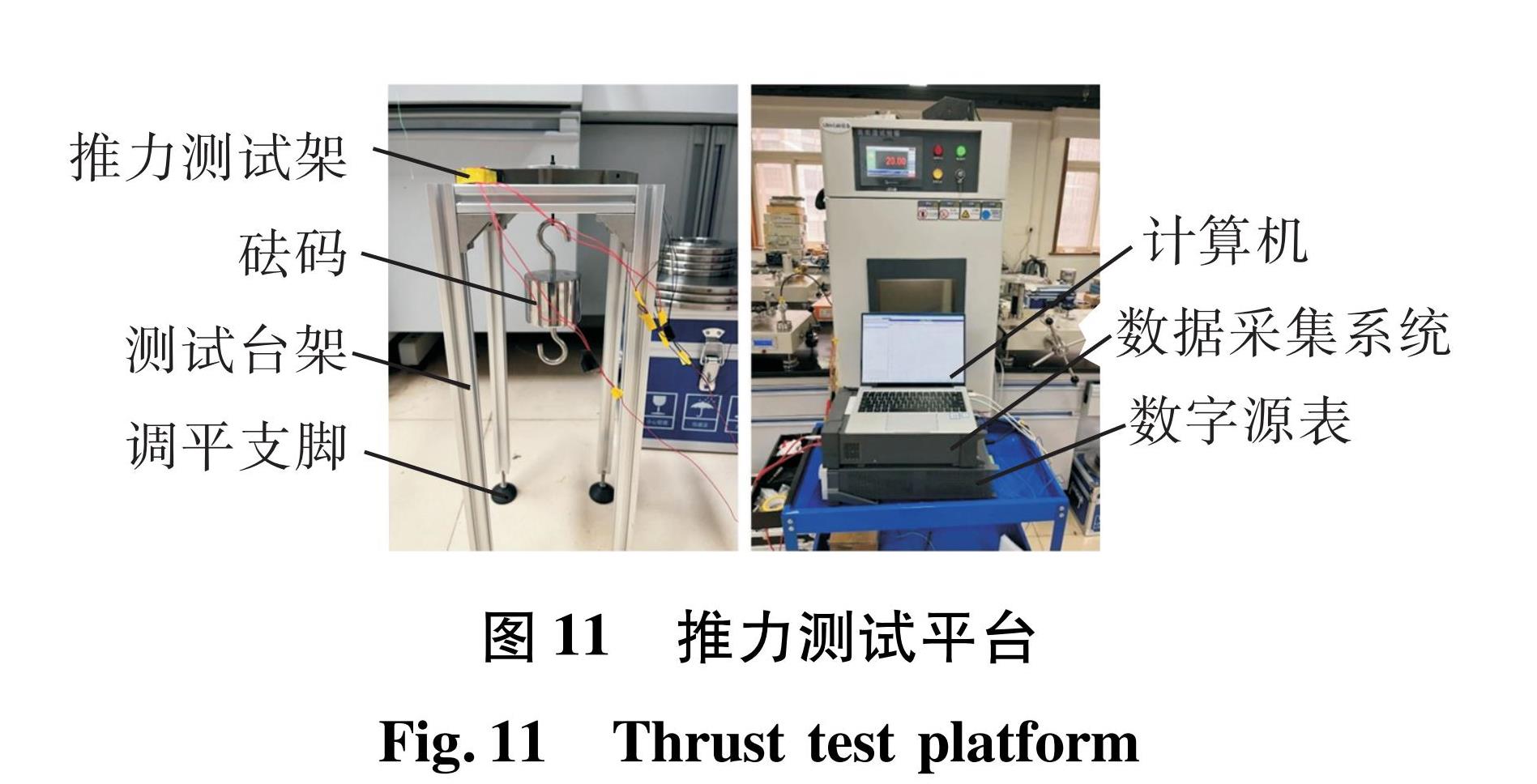
在对推力进行标定测量的过程中,将一体化推力测试架固定在由型钢拼接搭建成的测试台架上,利用水平仪和调平支脚将测试台架整体调平,使用标准砝码模拟轴向力进行推力标定,整体的测试平台如图 11所示。测试使用的仪器设备为DAC6510数据采集系统(测量桥路电压与采集数据)、2612A数字源表一台(桥路供电)、笔记本电脑一台。
图 11 推力测试平台
Fig.11 Thrust test platform
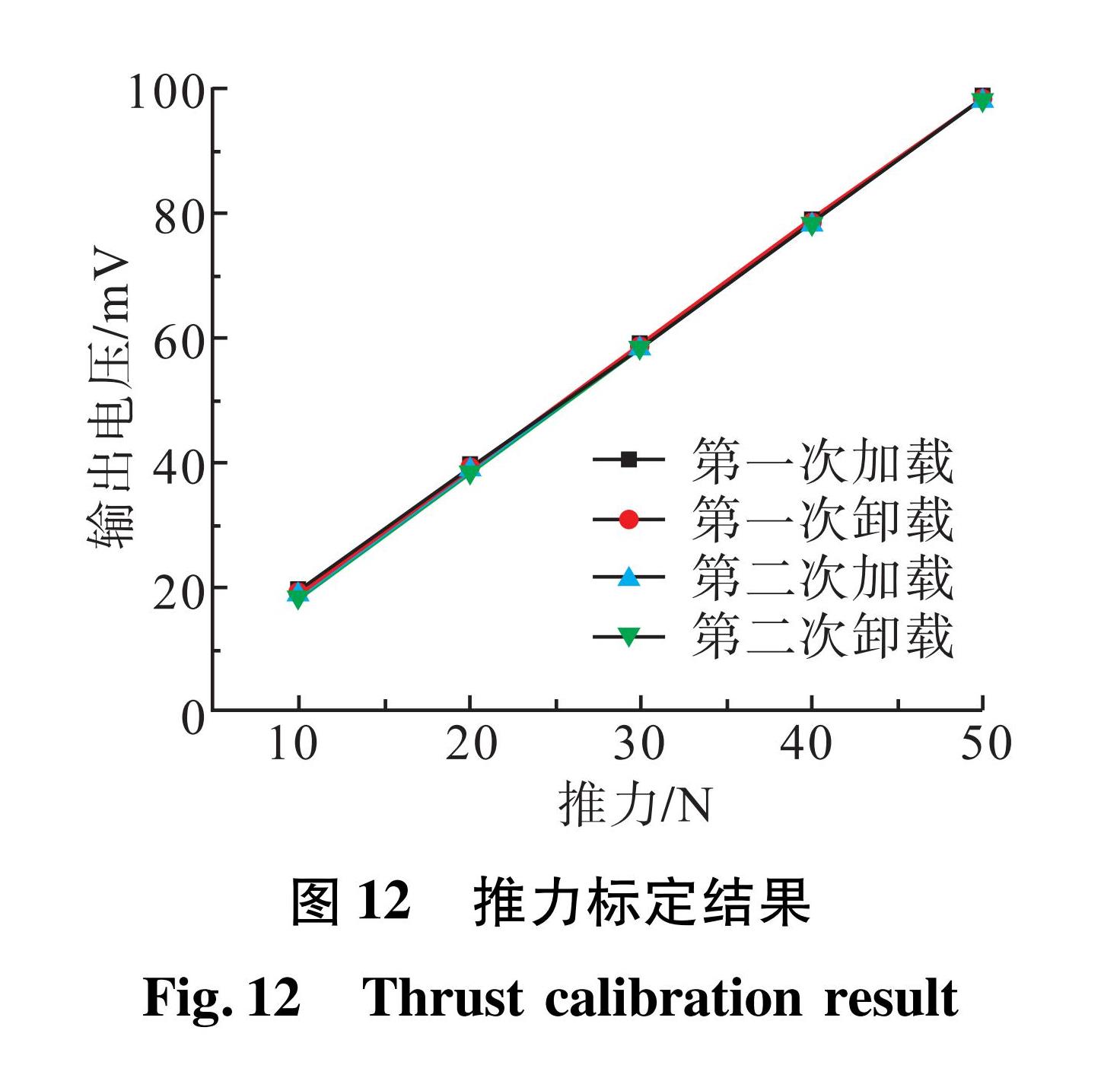
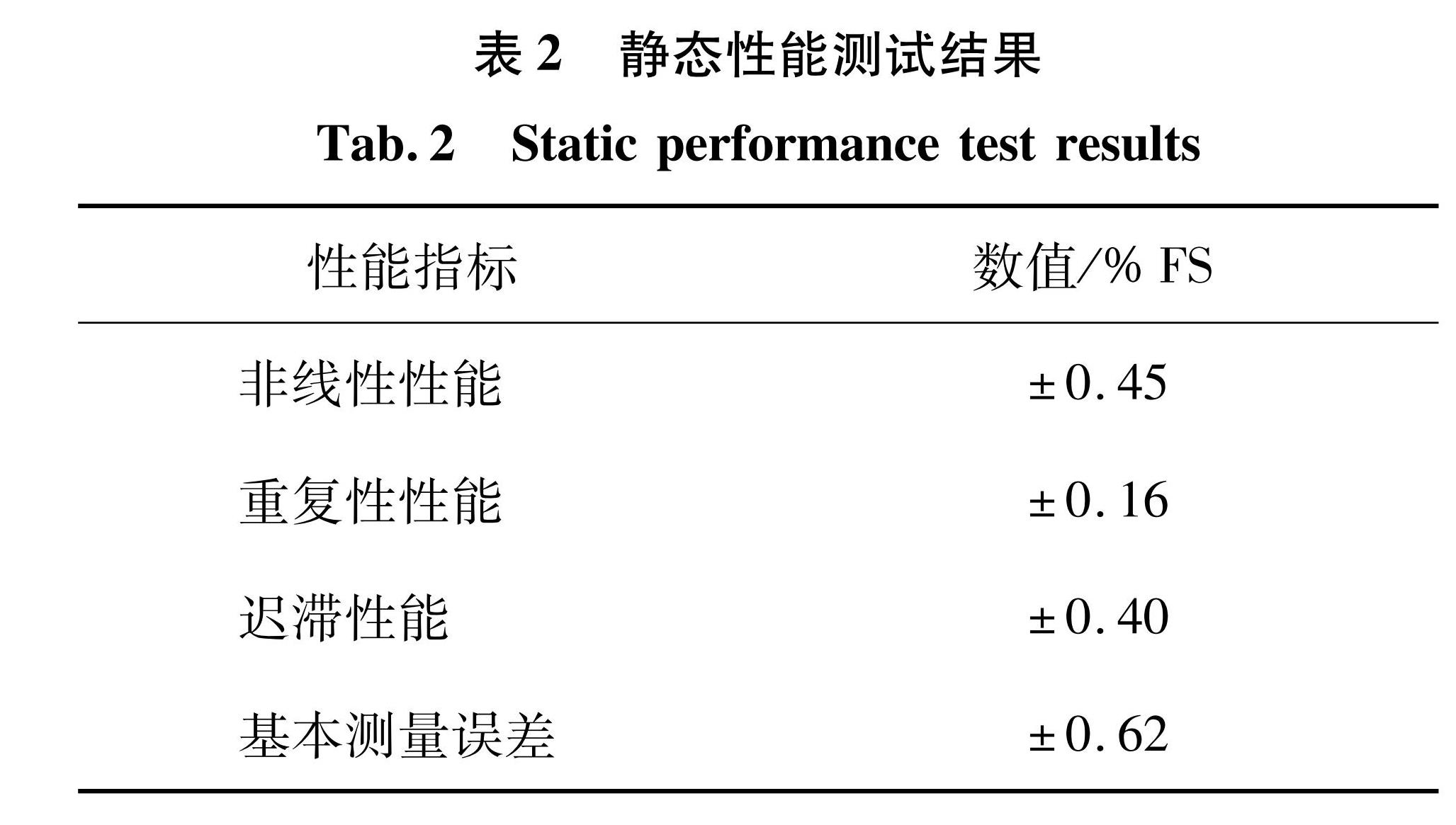
推力测试架的量程为50 N,在室温下从空载至满量程每隔10 N进行测试,进行2次反复升降程测试,记录输出电压的变化,得到传感器在室温下的静态测试结果,如图 12和表2所示。表征传感器静态压力特征的指标主要有线性度、迟滞性、重复性、综合精度、灵敏度等,根据所测得的实验数据,计算相应指标。
图 12 推力标定结果
Fig.12 Thrust calibration result
表2 静态性能测试结果
Tab.2 Static performance test results
3.1 线性度
在力传感器中,为了测试标定和数据处理方便,得到的输入输出关系为线性。在非线性误差不大的情况下,通常采用直线拟合的方法来实现线性化,在采用直线拟合线性化时,输入输出的实际测量曲线与其拟合直线之间的最大偏差,就称为非线性误差或线性度,通常用相对误差来表示,即

式中:ΔLmax为最大非线性误差; yFS为满量程输出。
根据实际测试数据计算出非线性误差为γL=±0.45%FS。
3.2 迟滞性
传感器在正反行程中输入输出曲线不重合的现象被称为迟滞,迟滞误差又被称为回程误差,一般以正反行程中输出值的最大偏差与满量程输出的百分比表示,即

式中ΔHmax为正反行程中输出值的最大偏差。
根据实际测试数据计算出迟滞性误差为γH=±0.40%FS。
3.3 重复性
重复性是指传感器在相同环境条件下,输入量按同一方向在全量程范围内连续多次变化时所得到特性曲线的不一致程度。
重复性误差为随机误差,通常用标准偏差表示。其计算方法为首先计算得到各检定点上正反行程子样标准偏差,即
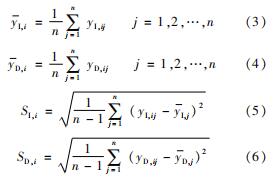
式中:SI,i为第i个校准点上正行程校准数据的子样标准偏差,i=1,2,…,m,下同; SD,i为第i个校准点上反行程校准数据的子样标准偏差; yI,ij为正行程第i个校准点上第j次测量数据; yD,ij为反行程第i个校准点上第j次测量数据; y^-I,i为正行程第i个校准点上数据的算术平均值; y^-D,i为反行程第i个校准点上数据的算术平均值。
传感器在整个测量范围内的标准偏差,其计算方法为将以上子样标准偏差求平均值,并进行开平方,即

传感器的重复性表示为其随机误差的极限,其计算方法为

根据实际测试数据计算出重复性误差为γR=±0.16%FS。
3.4 基本误差
传感器的基本误差计算公式为
A=±(γR+γLH) (9)
式中γLH为传感器的系统误差。采用最小二乘直线为工作直线的压力传感器,计算各检定点正行程输出值的算术平均值和反行程输出值的算术平均值,分别与最小二乘直线相应的yLSi之间差值,按式(10)与式(11)计算。

|ΔyLH|max为式(10)~式(11)所有数据中绝对值最大的值,系统误差计算式为

根据实际测试数据计算出基本误差为A=±0.62%FS。
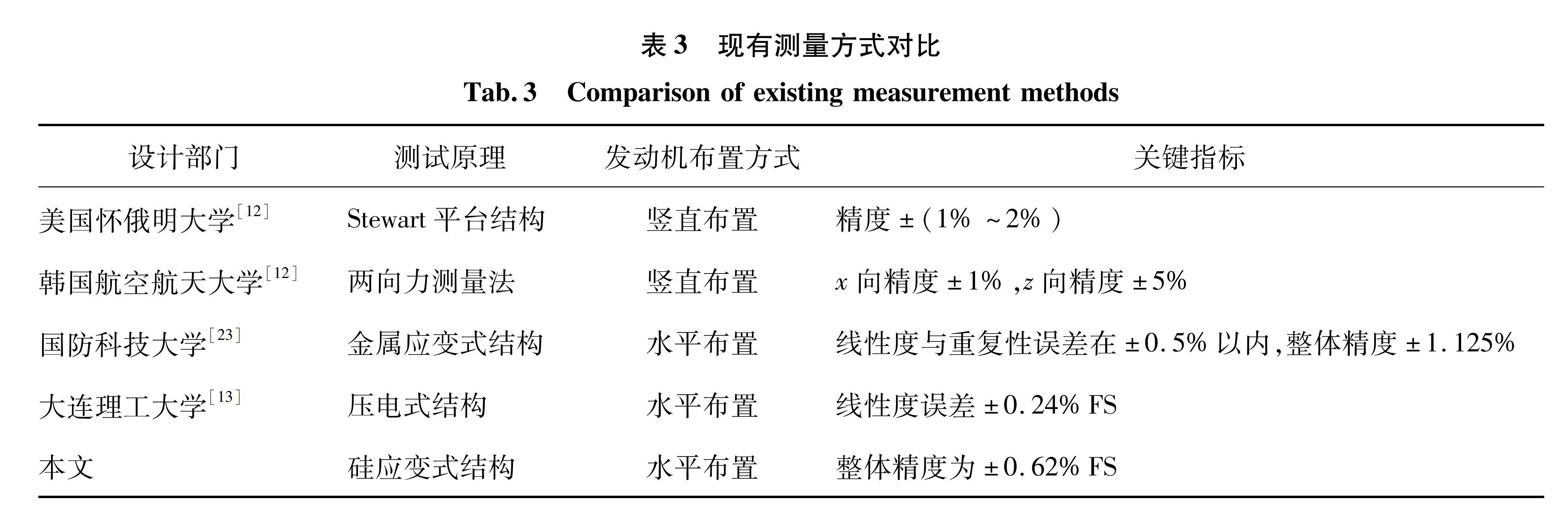
最终通过计算分析,传感器的非线性为±0.45%FS,重复性为±0.16%FS,迟滞性为±0.4%FS,基本测量误差为±0.62%FS。现有测量方法对比如表3所示。
表3 现有测量方式对比
Tab.3 Comparison of existing measurement methods