核磁共振成像技术(MRI)利用非零磁矩原子核在磁场中的自旋运动特性进行成像。在特定的射频激励作用后,施加梯度磁场与流动编码,解析原子核运动的相位变化,从而实现空间三维速度的测量。
在微观世界中,粒子都在发生自旋运动,自旋是微观粒子的基本属性。以氢原子核为例,氢原子核在外界静态强磁场B0(假设B0沿z轴正方向)中受到磁场力矩的作用,氢原子核绕外磁场B0的方向以频率ω=γB0进动,这种运动状态被称为拉莫尔进动,其中ω为拉莫尔频率,γ为原子核旋磁比。单个原子核的运动状态是无法被观测到的,当大量氢原子核发生拉莫尔进动后,此时可以检测到沿外磁场B0方向存在一纵向磁化矢量M0,在垂直于外磁场B0的平面内磁化矢量分量为0。当施加射频激励(RF),其频率为ω,此时氢原子核将吸收射频脉冲能量,从而发生核磁共振现象。在射频激励磁场的作用下,原子核进动状态偏离平衡态,纵向磁化矢量M0方向发生改变,在垂直于外磁场B0的平面内产生横向磁化Mxy,此时磁化强度M的大小和方向均发生了变化。停止施加射频激励后,磁化强度M将逐渐恢复到初始磁化矢量M0。在此过程中,磁化强度M在xy平面内螺旋式衰减。在垂直于外磁场平面内放置一个接受线圈,依据法拉第电磁感应定律可知,由于磁化强度M不断变化,接受线圈内将产生感应电动势,这种信号即为核磁共振输出信号MR。
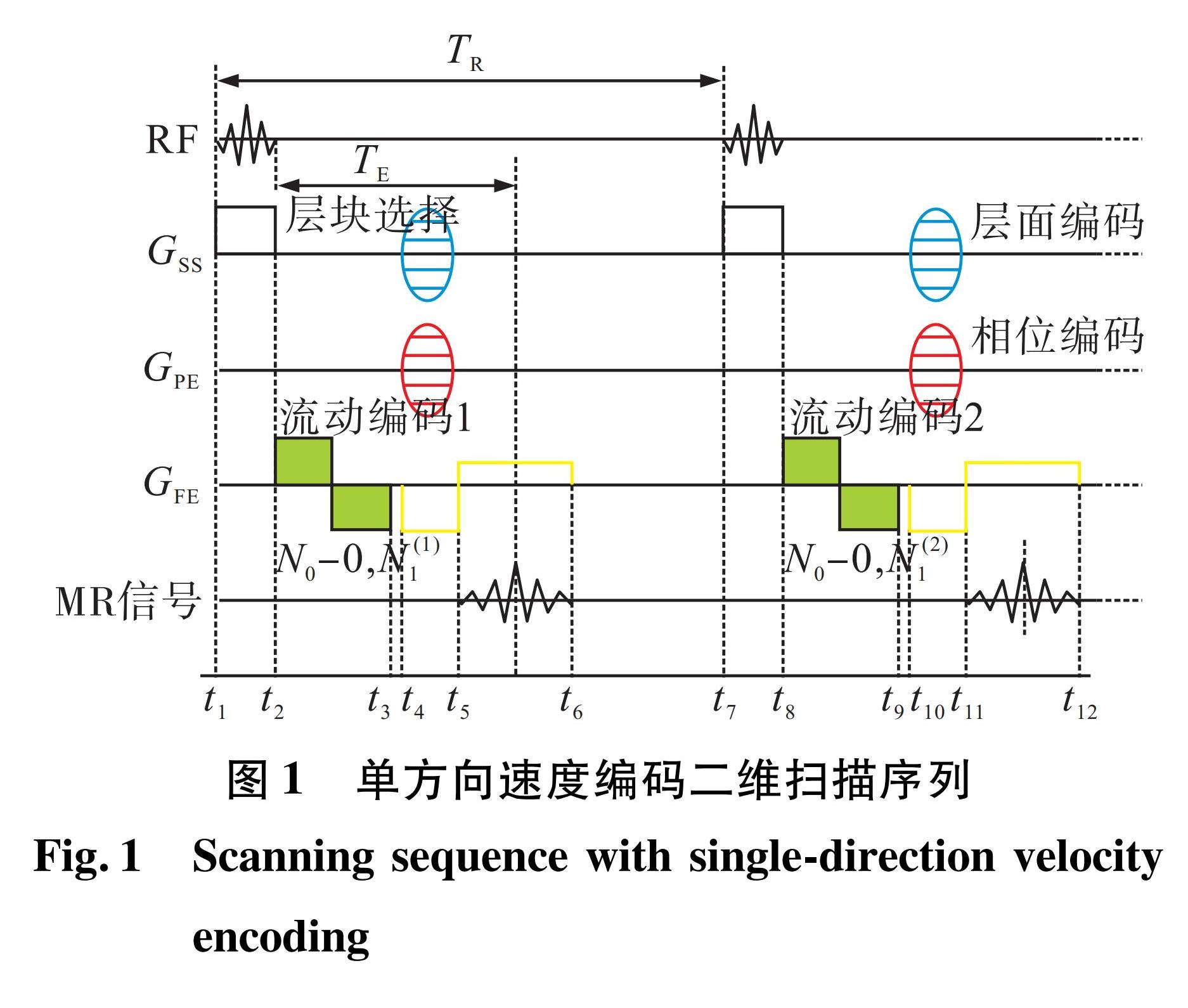
仅在外磁场B0作用下,检测样本内所有的原子核均以相同的拉莫尔频率发生共振,接收到的MR信号不具有任何空间信息。因此为区分不同空间位置产生的输出信号MR,对空间内3个正交方向施加不同的梯度磁场。如图1所示,先在z方向施加层面选择梯度GSS使得沿z方向不同层面的原子核具有不同的共振频率,在y向和x向分别施加相位梯度磁场GPE和频率梯度磁场GFE,此时同一层面沿x方向和y方向的原子核具有不同的共振频率和相位,从而使不同空间位置的原子核具有不同的MR信号。为降低噪音对信号的影响,多次重复测量后取MR信号平均值进行处理。对MR信号进行二维傅里叶变换,得到扫描空间内不同位置的原子核产生的信号强度和相位信息,并转换为对应的灰度图片。
图1 单方向速度编码二维扫描序列
Fig.1 Scanning sequence with single-direction velocity encoding
氢原子的宏观运动会影响MR信号的相位信息,通过分析输出信号MR的相位信息,可实现对扫描区域流体速度的测量。假设氢原子核以速度u沿x方向运动,由于此时在外磁场B0中施加了施加层面选择梯度GSS,氢原子核的拉莫尔频率ωL应表示为
ωL(x,t)=γ[B0+G(t)·x(t)] (1)
式中x(t)=x0+u(t-t0),x0为氢原子核在初始时刻t0时的位置。
由式(1)可知,当地拉莫尔频率ωL受梯度磁场和氢原子核宏观运动的影响。在时间段τ内氢原子核进动的相位可表述为
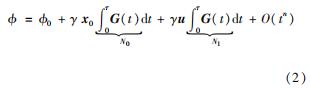
式中:φ0为氢原子核进动的初相位; N0表示梯度磁场对静止的氢原子核相位的影响; N1表示速度对氢原子核进动相位的影响。如图2所示,为使N0=0,对在梯度磁场中的氢原子核施加正负双向梯度磁场Gk(即流动编码),此时静止的氢原子核受梯度磁场的影响N0变为0; 受速度影响而产生的相位φ1为

此时氢原子核进动相位中初相位尚未被消除,故在MRV扫描序列中连续施加两次流动编码,即在图1中t2~t3和t7~t12时施加流动编码。由于初始相位相同,经过两次流动编码后,氢原子核进动相位差Δφ可表示为

由此计算得到沿x方向速度为

式中venc为当前扫描序列所能检测的最大速度值。依据实验确定所需的venc值以及MRV扫描序列。经过三维傅里叶变换,MR信号可解析为幅值和相位信息,由式(5)即可获得沿x方向的时均速度。基于同样的方法,改变编码方向,即可获得整场三维速度分布。
图2 流动编码[17]
Fig.2 Flow encoding[17]
![图2 流动编码[17]<br/>Fig.2 Flow encoding[17]](2024年06期/pic174.jpg)


![图 11 光滑通道不同高度二维速度分布云图[21]<br/>Fig.11 2D-velocity distributionat different z/h of the smooth channel[21]](2024年06期/pic183.jpg)
![图 13 光滑直角弯道流向法向方向平面速度分布云图[21]<br/>Fig.13 Velocity distribution in the normal plane of the flow direction of the ribbed channel[21]](2024年06期/pic185.jpg)
![图 15 光滑通道U型弯道流向方向平面速度分布云图[21]<br/>Fig.15 Velocity distribution in the normal plane of the flow direction in the U-shape bend of the smooth channel[21]](2024年06期/pic187.jpg)
![图 18 带肋通道端壁努塞尔数分布云图[22]<br/>Fig.18 Nusselt number distribution on the endwall of the ribbed channel[22]](2024年06期/pic190.jpg)